By next Monday, you should decide on a second lab project. All of the projects listed from the course assignments page are available, and you are welcome to design a project on your own, as well. One rather experimental project to consider is to equip one of the small robots (the Lego Mindstorms, Handyboard-based, RugWarrior, or PalmPilot robots in particular) with longer-range sensors (sonar, vision, a compass, and/or longer-range infrared) in order to implement a wall-following (and navigating) system.
Project choice:
Consider a two-steerable-wheel bicycle sketched in the figure below. As in an ordinary bicycle, only the front wheel is powered (with a velocity of Vf, while the rear wheel is free to roll to keep up. Both wheels have radius 1. However, both wheels can be steered independently, so that in a general configuration, the frame could form an angle Ar (alpha-r in the diagram) with the rolling direction of the rear wheel, and it could form another angle Af (alpha-f in the diagram) with the front wheel. You should assume that the length of the axle between the wheels is a known, fixed quantity L. Theta, of course, is (90-Ar) degrees.

First, set up a convenient coordinate system (theta is a hint as to one possibility). Within your coordinate system, what are the coordinates of the vehicle's instantaneous center of curvature? What speed does the rear wheel need to rotate in order to keep up with the front wheel?
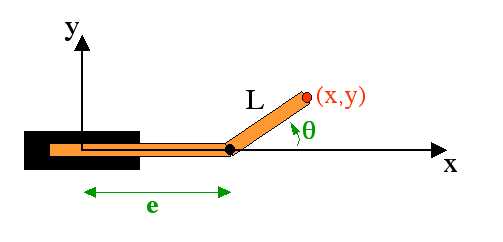
Find the forward and inverse kinematic model for the PR manipulator depicted below.
That is, for the forward
kinematics find expressions for x and y in terms
of the translational extent of the first link (e) and the
rotation of the second with respect to the first (theta).
For the inverse kinematics, find expressions for the robot's
parameters (e and theta) in terms of x and y.
Draw a few arm configurations to explain why there are two inverse-kinematic solutions
(for e and theta) for some, but not all, (x,y) locations.