CS121 Project 2
Face Collision Notes
The face collision algorithm takes as input a triangle, the starting and ending positions of
the ball, and the ball's radius. The algorithm returns an α in [0,1], which is the
fraction of the path the ball can travel before colliding with the front face of the
triangle. In the event
of a collision, the algorithm also returns the foward-facing
normal of the triangle.
We begin by describing the standardized face collision algorithm, which handles a special
case of triangles. Then we show how to
use the special case algorithm to detect collisions for arbitrary triangles.
Standardized Face Collision Algorithm
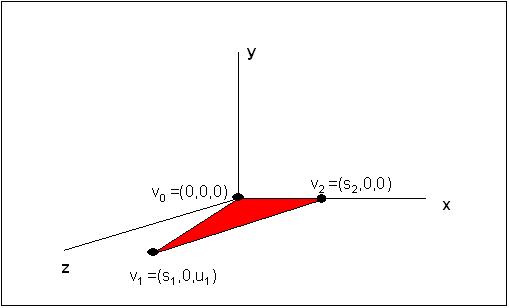
The special case we consider first is when the triangle is in a standard orientation;
triangle (
v0,
v1,
v2)
is in a standard orientation if
v0
is at the origin,
v1
is in the x - positive z half-plane, and
v2
is on the positive x axis. We note that the front face of a standardized triangle is facing up.
The figure below illustrates a triangle in standard orientation.
Let's assume that the input to the standardized face collision algorithm is the triangle
(
v0,
v1,
v2), which is in standard orientation, the path
endpoints,
p0
=
(x0,
y0,
z0)
and
p1
=
(x1,
y1,
z1), and the radius r.
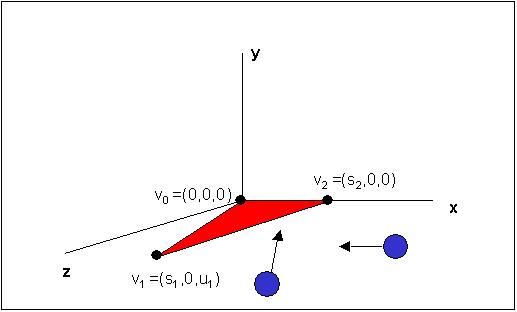
If y0 < r
or
y0
= y1 then there cannot be
a front face collision. In the first case, the ball, in its initial position,
either intersects the x-z plane or is below it.
In the second case, the
ball moves parallel to the x-z plane.
In either case, no matter how the ball moves it cannot collide with the front face of
the triangle. Our algorithm returns α=1. The two cases are illustrated below
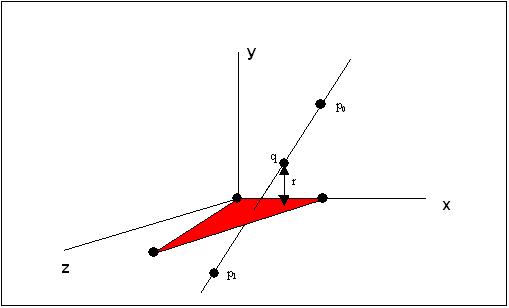
If neither of the two cases described above hold, we go on to test for
a face collision.
-
Find the point q
on the line through
p0
and
p1
that is exactly
r units above the x-z plane.
Note that the point q exists. Since
y0
≠ y1,
p0
and
p1
are distinct points and define a line. Further, this line is
not parallel to the x-z plane. Thus there is a unique point on this line
that is exactly r units above the
x-z plane.
To compute q, we first represent the line through p0
and
p1 parametrically as
p0
+ β
(p1
-p0).
Each point on the line corresponds to a unique value
of β. In particular,
p0
and p1
correspond to β=0 and β=1, respectively.
Points on the line segment between
p0 and
p0
correspond to values of β in the range [0,1].
To compute q, we simply need to find
the value of β such that the y-component of
q = p0
+ β
(p1
-p0)
is r.
This occurs at
β =(r-
y0)/
(y1
-y0).
-
If β is not in [0,1], then
q does not lie on the line segment between
p0 and
p1. In
this case we
can conclude that no collision occurs and return α=1.
-
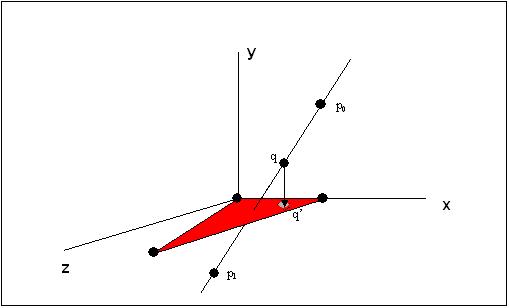
When
q lies on the ball's path, we go on to
test if the ball touches the triangle when its center is at
q.
We
compute the projection q' of
q onto the x-z plane.
Assuming q=(
xq,
yq,
zq),
the projection is simply q'=(
xq,0,
zq).
-
Determine
if q' is inside the triangle. If not, no
face collision occurs and the algorithm returns α=1. Otherwise a face
collision does occur when the ball is a β fraction of the
way along its path. In this case we return α=β.
Next we show how to test whether this projected point, q',
lies inside the
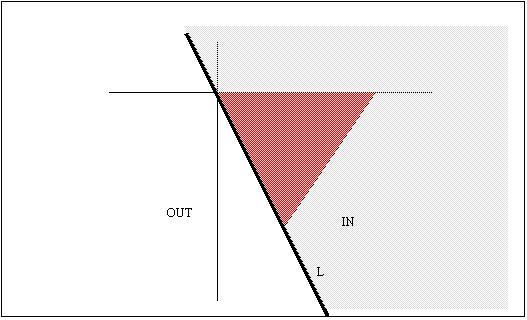
triangle. First we need a definition.
An edge e of the triangle lies on a line
L that partitions the
x-z plane into two half-planes. We'll say
that the point q' is
in with respect to e if q' lies in
in the half-plane defined by L
that contains the triangle. This idea is illustrated in the figure
below.
Thus the point
q' is inside the triangle if and only
if it is in with respect to the three edges of
the triangle.
Following are the tests that determine if
q' is in with respect to each of
the edges.
-
Edge (v0,
v1):
-
If this edge lies on the z-axis,
then q' is inside with respect to the edge if and only if
xq
> 0.
- If this edge does not lie on the z-axis, the equation of its line is
x =
x1
* z/
z1.
and q' is inside
with respect to the edge if and only if
xq >
x1
* zq /
z1.
-
Edge
(v1,
v2):
The equation of this edge's line is
x =
x2+
(x1-
x2)
*
( z-
z2)/
(z1-
z2)
and the point
q' is in with respect to
this edge if and only if
xq <
x2 +
(x1-
x2)
*( zq-
z2)/
(z1-
z2)
-
Edge
(v2,
v0):
This edge lies on the x-axis. The
q'
is inside with respect to the edge if and only if
zq
> 0 .
General Face Collision Algorithm
To detect a collision, we transform the triangle into
its standard orientation.
We also transform the ball's starting and
ending position into this standard frame.
We use the standardized face collision algorithm to determine
if a collision occurs and, if so, the corresponding α value.
Note that the α value is unchanged by the transformation.
We return this α value and,
if a collision does occur (i.e. 0 ≤ α <1),
the forward facing normal of the triangle in its real world
orientation.
Separate notes describe the algorithm for
standardizing a triangle
and for transforming points (the ball's starting and ending
position) into the standard frame. To speed our algorithm,
we can precompute the standard orientation of each triangle.
Last updated September 2004.