CS121 Project 2
Physics Engine
In Project 2 you'll build a one-hole miniature golf game. The
difficult aspect of this project is the physics engine, particularly
the problem of collision detection and response.
You'll start by building a physics engine to simulate a ball
bouncing around a 3D room; the room may contain closed surfaces defined
by triangle meshes. These notes describe a general strategy
for building the simulation. In addition, you'll build an OpenGL
interface to display the simulation.
For help with that problem, you should refer to the
OpenGL tutorial.
Overview
We can simulate the movement of the ball by computing its position
at a series of discrete times
dt seconds apart. The
position and velocity of the ball at time t=0 are
p0 and
v0 respectively.
The ball should not intersect any triangles
in this position though it may touch one or more.
The only forces
acting on the ball are gravity and those due to collisions.
Our objective is to compute the position and velocity
of the ball dt seconds later. An
overview of the algorithm follows.
-
Approximate the average velocity of the ball across the time step assuming
no collisions occur.
-
Compute the ball's path assuming constant velocity and no collisions
over the time step.
-
Determine if and when the ball first collides with a triangle while moving along the
path.
-
If a collision occurs before the end of the path:
-
Move the ball to the point of collision.
-
Compute the change in velocity due to the collision.
-
Compute the remaining time in the time step.
-
Return to step 1 and simulate the movement of the ball over
the remaining time in the time step
based on the new position
and velocity.
-
Move the ball to the end of the path.
The simulation then repeats for the next time step.
The remainder of
this document fills in the details.
- Velocity Computation
In an absence of a collision and other forces, the velocity of the ball
at the end of the time step is
v1=
v0 +
g dt
where v0 is the initial velocity of the ball
and
g is the acceleration due to gravity.
We approximate the average velocity over
the time step as
vavg
=(v1+
v0)/2.
Path Computation
We approximate the ball's movement by assuming that, in the absence of a collision, the
ball moves with constant velocity vavg
across the time step. Under these assumptions the ball will move from its current position,
p0, to
the point
p1 =
p0
+ vavg dt =
p0
+ v0 dt +
0.5g dt2
during the time step.
Collision Detection
The collision detection algorithm takes as input the path endpoints
p0 and
p1, the ball's radius r,
and a description of the triangles in the scene.
The algorithm returns α in [0,1], which
is the fraction of the path the ball can travel
before colliding with a triangle. If no collision occurs the collision detection
algorithm returns
α=1. To clarify, the algorithm returns 0 if the ball
is colliding with a triangle in its initial position,
p0. The algorithm returns 1
if no collision occurs
or if a collision occurs exactly when the ball reaches the end of its
path, p1.
The algorithm returns α in (0,1) if the first collision occurs αdt seconds into the time step.
If a collision is detected during the time step, the collision detection algorithm also returns the surface normal
at the point of collision.
A description of the collision detection algorithm can be found here.
Collision response (α < 1):
If the collision detection algorithm returns α < 1, we do the following.
-
Reset the
ball's center to
p'0 =
p0 +
vavg
αdt.
In this position the ball is touching but not intersecting any triangles.
-
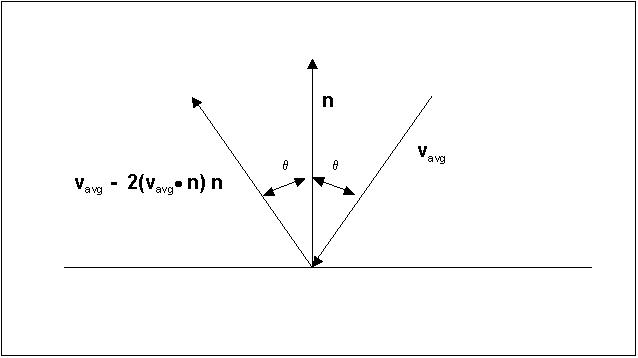
Reset the ball's velocity to
v'0 =
d[
vavg -
2(vavg
• n)
n ]
where d in [0,1] is a damping factor and n is the surface normal at the point of collision.
The geometric interpretation of this computation is shown in the figure below.
The derivation of the velocity computation is
given in separate notes.
-
Reset the time step length to
dt' =
(1- α)dt.
-
Sttart a new simulation
with the ball's initial position set to p'0, its velocity set to
v'0, and a time step length of dt'.
(Note that dt' > 0.)
Move to end of path (α=1):
When the collision detection algorithm returns α=1, then either there
is no collision in the current time step or it occurs exactly when the ball reaches the end of its path.
In either case, we reset the ball's position
to the end of the path and
go on to simulate the next time step. (If the ball is colliding with a triangle
in this position, the collision will be detected at the
start of the next time step.)
Last updated 2/26/04