CS121 Project 2
Triangle Standardization Notes (Draft Version)
A triangle (
v0,
v1,
v2
)
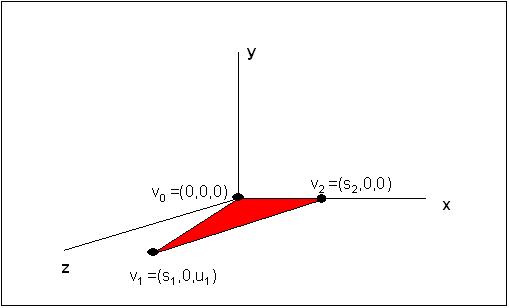
is in standard orientation if
v0
is at the origin,
v2
is on the positive x axis,
and
v1
is in the x - positive z half-plane as illustrated below.
These notes describe the algorithm for computing the standardized
version of an arbitrary triangle. Code that implements this algorithm can
found here. A similar algorithm is used
to standardize triangle edges. The code that implements the edge
standardization algorithm is here.
Let T=
(v0,
v1,
v2
)
be an arbitrary triangle. (We assume that it is
a triangle, i.e. that the points are not co-linear.) We can generate the
standard version of the triangle by applying a translation and two rotations to
its vertices.
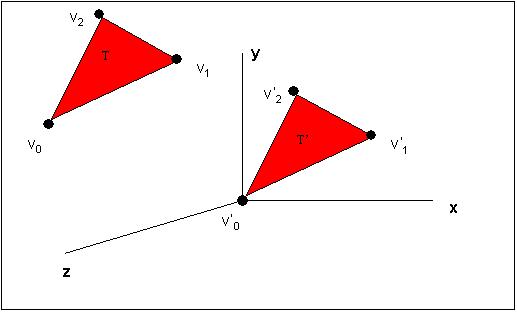
-
The first step is to translate the triangle so its first vertex is at the origin
(Fig. 1).
To do this we simply translate each vertex by
-v0=
(x0,
y0,
z0).
Let T'=
(v'0,
v'1,
v'2
) be the translated triangle; i.e.
v'0 = (0,0,0).
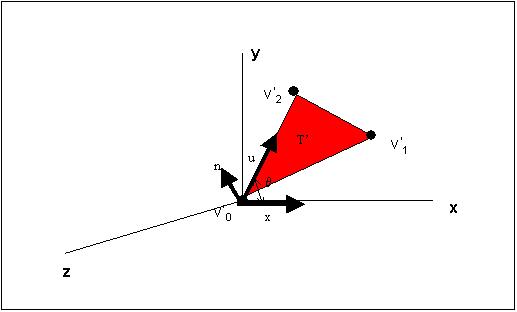
-
Next we rotate the triangle T'
so that its last edge is on the positive x-axis as shown
in the figure below.
 Let u be the unit vector
from the origin toward the point
v'2
and let x=<1,0,0>.
There are three cases.
Let u be the unit vector
from the origin toward the point
v'2
and let x=<1,0,0>.
There are three cases.
-
If u=x, the edge is already in position and no rotation is necessary.
-
If u=-x, the edge lies on the negative x axis. The desired rotation
is 180 degrees about the vector <0,1,0>.
-
Otherwise, u and x
define a plane. The normal, n, to this plane is
given by their cross product.
The cosine of the angle, θ, between them is given by their
dot product. We can align u with x
by rotating our vertices by θ
about n as illustrated in the figure below.
 Here are the necessary computations.
Here are the necessary computations.
-
u = <
x'2,
y'2,
z'2,
>/
(
x'22 +
y'22 +
z'22
)1/2.
-
n =
u X
b
= < 0,
z'2,
-y'2
>.
-
θ = arcos ( u dot x ) = arcos(x2)
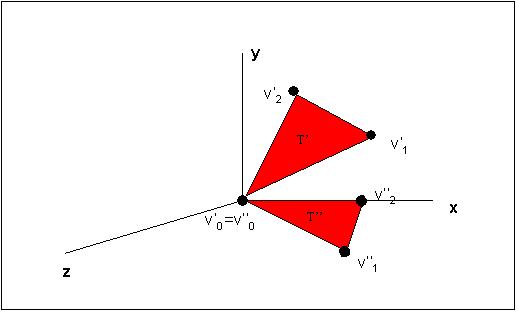
Let T''=
(v''0,
v''1,
v''2
) be the rotated triangle; i.e.
v''0 = (0,0,0) and
v''2 =
(x''2,0,0) for some
positive x''2.
-
Finally, we need to rotate T'' about the x-axis so that it lies
in the x-positive z half plane. Note that the angle, β,
between T''
and the x- positive z plane is the angle between the
vectors <0,
y''1,
z''1 >
and z=<0,0,1>.
If
y''1
≥0, then the dot product of these vectors is cos(β). If
y''1 ≤ 0,
then the dot product yields cos(-β).
Rotation is a linear transformation and can be represented by an
appropriate 3x3 matrix transform.
Translation, which is not a linear transformation, can be represented
by a matrix tranform in 4 dimensions. Thus the net effect of these
three transformations can be represented by a 4x4 matrix. In
fact, OpenGL will compute this transformation matrix as demonstrated
in the standardization code. To transform
a 3D point (e.g. the starting or ending positions of the ball)
into the triangle's
standard frame pass the forwardTransform (compute in the standardize code)
to this matrix multiply method for the Tuple class.