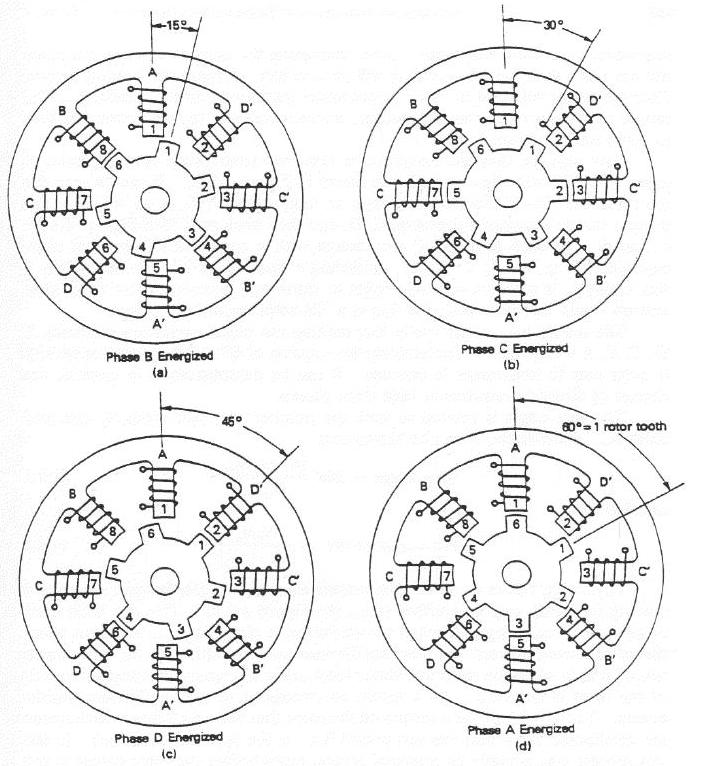
The example stepper motor shown in class had 4 teeth on the stator and 2 on the rotor. The angle that that motor turned for each full step was 90 degrees. A full step is considered the smallest (nonzero) angular turn that causes two teeth on either side of the rotor to align with two teeth (also diametrically opposed) on the stator. For example, the diagram below shows four consecutive full steps of 15 degrees each in a stepper motor with a six-toothed rotor and eight-toothed stator.
Question 1 How large is the full-step angle in a stepper motor with R rotor teeth and S stator teeth? Note that you may need to consider separate cases, depending on the values of S and R. You may assume, however, that S is an even number greater than 4 and R is an even number greater than 2. Why would the motor not be very useful if If S == 2 ? (5 points)
Question 2 A typical commercial stepper motor offers a full-step resolution of 1.8 degrees. What would you guess are the number of rotor and stator teeth on such a motor? In particular, try to minimize the total number of teeth needed to achieve this resolution. After all, fewer teeth mean simpler construction and control. (5 points)
For each homework assignment (roughly every other week), you should update your lab project's webpage to reflect the work you have done in that span. This will be included, as it is here, in the short assignemnts.
An important quote to keep in mind is the following, borrowed from roboticist Erann Gat's quote collection:
Furious activity is no substitute for understanding.
Of course, furious activity might lead to understanding -- in which case it would be considered a good thing. But it is a also good idea to step back and reflect on a project even while you're working on it... . Lab project week #1: Get Moving!
(AIBO team: we will be working out a separate set of goals for each HW assignment.)
- Create the Evolution ER1 (your milange will vary!) Be sure to include a picture of your platform in your write-up, as well as how long it took you to build it (if you built it). There is a still-photo digital camera available in the locked filing cabinet, as well as an MPEG camera.
- Software
This will require installing the following software (or making sure
it's already installed!):
- ERSP, the Evolution Robotics Software Platform, which has the drivers for the ER1
- Visual Studio .NET -- There are two computers on which this will not install (but executables will run).
- The software from the CS 154 software page.
- Get it running! You should write a client (in whatever language you wish) that will move the ER1 around... no additional tasks are required for this week, though you are welcome to be as ambitious as you'd like! It's great to have "before" images (or video) of your robot moving around, as it puts the accomplishments made later into much clearer context.
- Be sure to describe your progress on your webpage as you go along... This is where I'll go to read the current status of your project. (In addition, if you have something you would like to demonstrate physically, feel free to grab me any time. I'd love to see it!)
The following is a rough, general guide to putting together a technical
report on a robotics project, e.g., for submission to a conference. Particular
projects may omit some of these points and include others. (Most will be very similar
for the first half of the term, however!) Creativity (or, perhaps, creative copying)
is welcome for your website layout, e.g., see the Duck Hunt page at
http://www.cs.hmc.edu/~dodds/projects/RobS04/DuckHunt/index.html.
- Introduction
- What problem are you addressing?
- What are the primary objectives of your work?
- How does this project relate to previous work? (cite)
- Why is this project new, interesting, and/or important?
- Background
- What makes this problem difficult?
- What have others done or what are various possible approaches? (cite)
- Motivate the features of the problem that your solution will focus on.
- In what ways are you limiting the scope of the problem to make it more tractable?
- Include any background equations or less-formal relationships here, or anything else a reader might need to be reminded of.
- Approach
- What were the key design decisions you made?
- Why did you choose your approach over other possible approaches?
- What were the difficulties your approach entailed?
- How did you get around them?
- Diagrams are often excellent summaries.
- Progress and Performance Results
- Provide images and/or data, along with descriptions and explanations of them.
- When constructing systems or processing data, before-and-after pictures of the robot (or raw/processed data) are often excellent summaries of progress.
- Perspective
- How well did your system perform?
- What were some of the key factors in its success or failure?
- What could be done to improve your system?
- What other interesting problems or areas of investigation does this project and its results suggest?
- References
- Here you should reference at least the papers required for CS 154! Other references and web references are, of course, welcome, too.
For HW #2, you should provide initial versions of Introduction, Approach, Progress, and References sections, with the above tasks recorded inside Progress.