CS 154 Homework #6
Due Friday, Mar 11, 2005
Readings for HW 6:
Robotic Mapping: A Survey
by Sebastian Thrun, CMU-CS-02-111, February 2002 (pdf)
Lab Project Week 6: Multi-Sensor Localizing with MCL (100 points)
Overview The basic object of this assignment
is to layer a localization capability atop your robot's
wandering from the last assignment. You are welcome to run the
wandering as is (or alter it, if you prefer). Either way, you
should take advantage of the new MapTool (available
from the top of the software page)
in order to visualize where the robot thinks it is within our
map of the libra complex.
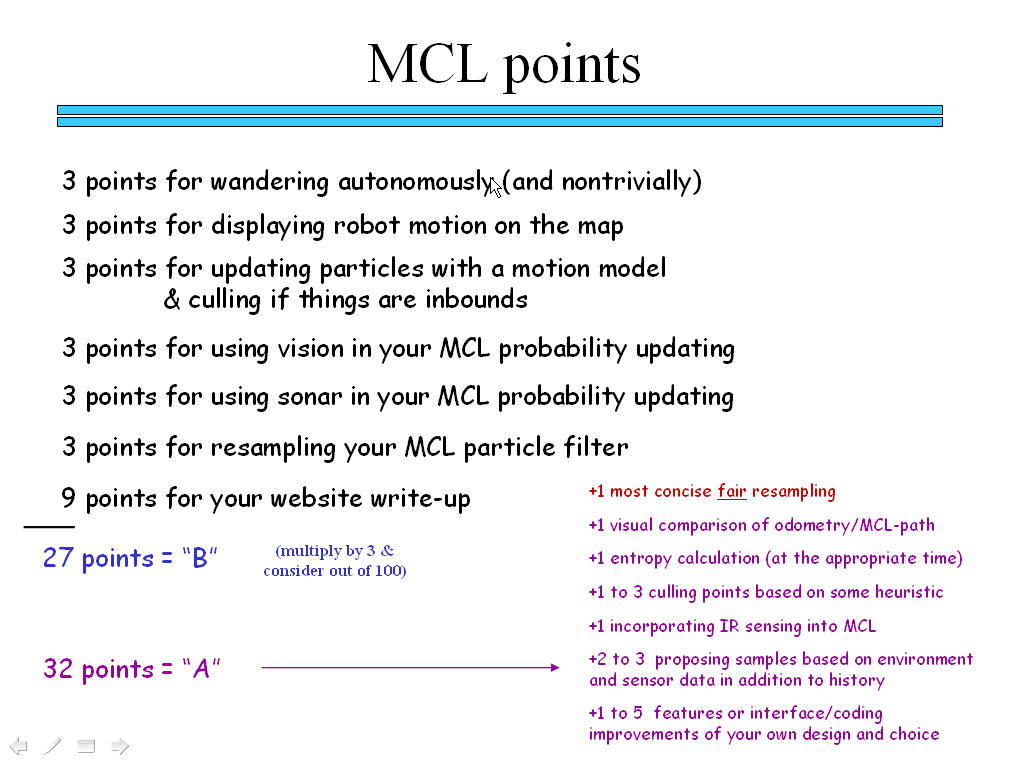
Scoring There are a number of subtasks
in this assignment, each with an associated number of points.
Completing, demonstrating, and writing up the basics of Monte Carlo
Localization will earn 27 points, which corresponds to a B
grade. (We will multiply by three and consider the score out of 100).
However, there are lots of additional features you might implement
and these will be taken into account, as well. The following
image shows the breakdown and some of these suggestions.
A couple of important points:
- Be sure
to document your work on your website so that I'll know you've
done it!
I will also look at your code (you should link your
- Please link the full MapTool.zip collection of files
that you create (you will likely change more than one file in MapTool.zip).
Although I will look at this, I probably won't be able to find any
extra features that I haven't been alerted about from your site.