-
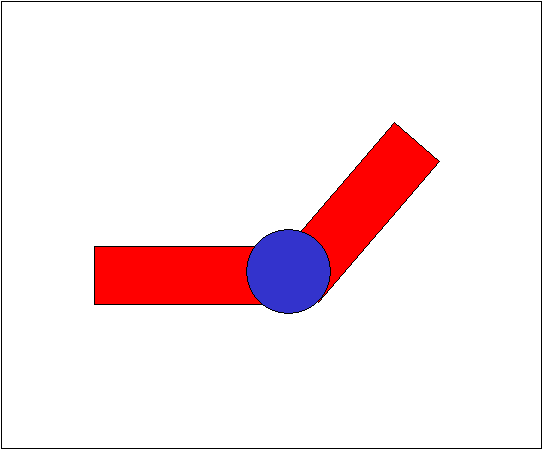
Annotate the figure above using DH notation using variable names for
link lengths (li) and angle (θi). Clearly identify
how these lengths and angles are measured in the figure. (All joints rotate about <0,0,1>.)
-
Assume the end effector is at the right end of the second link. Write the Jacobian for the position of the end effector. Annotate the figure with
any additional variables you
use in the Jacobian and with the global reference frame.
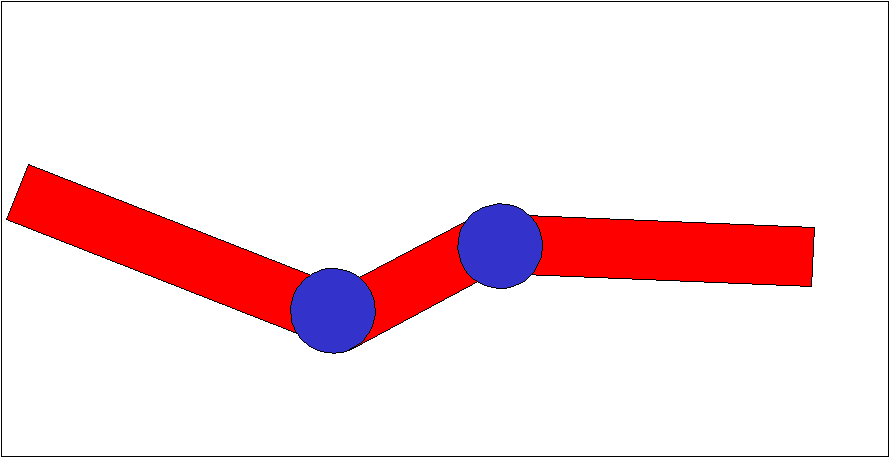
Try the program for n=2, l[0]=1, l[1]=1, theta[0]=0, theta[1]=π/4. Write the Jacobian below.
This program reads input matrices from "matrx3.dat" and computes their Singular Value Decomposition. The SVD of an mXn matrix M consists of matrices U, W, and V where
- M=UWVt (the t superscript denotes transpose)
- U is mXn
- V is nXn
- W is an nXn diagonal matrix; i.e. all off-diagonal elements are 0. (The demo program only writes the diagonal elements for W: w00, ... , wn-1,n-1.)
If W is invertible then the pseudo-inverse of M=UWVt is M+=VW-1Ut. Suppose W is 2x2 with diagonal elements a and b. Write W-1 below.
When is W not invertible?
In general M+=VW'Ut, where W' is the nXn diagonal matrix with w'kk=1/wkk provided wkk ≠ 0 and otherwise w'kk=0.
Augment the SVD demo program to compute and print M+.
Write the pseudo inverse of each of the sample input matrices below.