Readings for HW 2:
Experiments in Automatic Flock Control by R. Vaughan, N. Sumpter, A. Frost, and S. Cameron,
Proceedings, 1998 Symposium on Intelligent Robotic Systems, Edinburgh, UK.
Modular Robot Climbers by Nadeesha Ranasinghe, Jacob Everist, Wei-Min Shen,
Proceedings, IROS 2007 Workshop on Self-Reconfigurable Robots.
Short-answer questions
Please "submit" these simply by posting them to an appropriate link, page, tab, or area of
your CS154 website.
Short-answer question #1 Stepper Motors
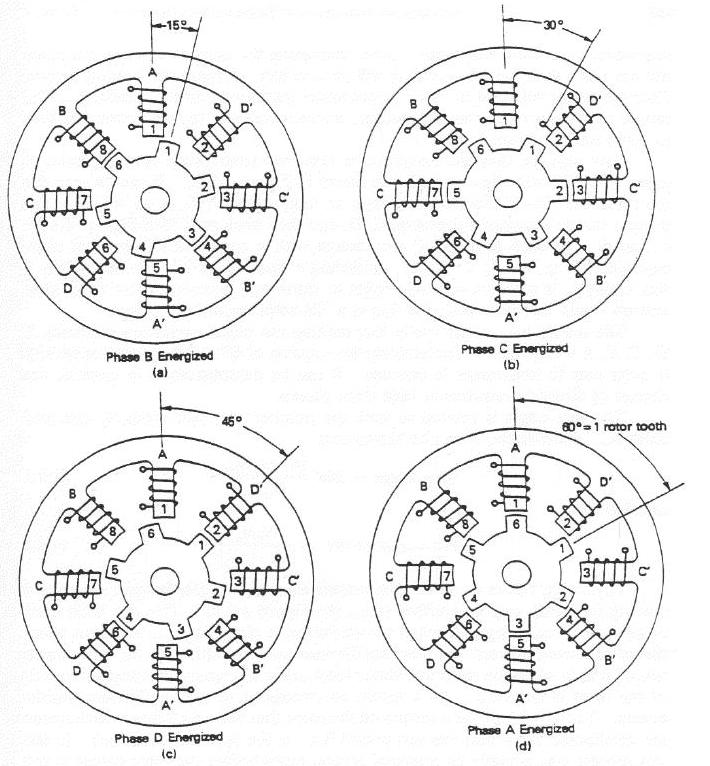
The example stepper motor shown in class had 4 teeth on the stator and 2 on the rotor. The angle that that motor turned for each full step was 90 degrees. A full step is considered the smallest (nonzero) angular turn that causes two teeth on either side of the rotor to align with two teeth (also diametrically opposed) on the stator. For example, the diagram below shows four consecutive full steps of 15 degrees each in a stepper motor with a six-toothed rotor and eight-toothed stator.
Part A How large is the full-step angle in a stepper motor with R rotor teeth and S stator teeth? Note that you may need to consider separate cases, depending on the values of S and R. You may assume, however, that S is an even number greater than 4 and R is an even number greater than 2. Why would the motor not be very useful if If S == 2 ?
Part B A typical commercial stepper motor offers a full-step resolution of 1.8 degrees. What would you guess are the number of rotor and stator teeth on such a motor? In particular, try to minimize the total number of teeth needed to achieve this resolution. After all, fewer teeth mean simpler construction and control.
A typical, inexpensive servo motor might have a 180-degree range of motion. One such hobby motor (they're typically only $10 each) is disassembled in a plastic bag in the robotics lab. This question asks you to determine how many rotations of the motor shaft are required to attain the full 180-degree range of motion that the end-effector (the output shaft) actually exhibits.
In essence, this is only a gear-ratio question, but because the system of gear-reductions is so compact, there is an additional puzzle element here: you'll have to determine how the gears interact, because the pieces are partially disassembled in the bags. You don't need to actually count gear teeth (feel free to use variables to represent their number of teeth), however clever ways of counting the number of teeth would be welcome -- mostly so that I know how many are on some of the gears -- they're too small for me to confidently count one-by-one!
There is a second back with a partially-disaassembled gear train in the lab -- this one has a wheel from an iRobot Roomba inside it. For this gear train, determine how many rotations of the servo motor are required in order to turn the Roomba's wheel one full revolution. Explain the ratios involved.
Consider a two-steerable-wheel bicycle sketched in the figure below. Unlike ordinary bicycles, here the front wheel is powered (with a velocity of Vf), while the rear wheel is free to roll to keep up. Both wheels have radius 1. However, both wheels can be steered independently, so that in a general configuration, the frame could form an angle Ar (alpha-r in the diagram) with the rolling direction of the rear wheel, and it could form another angle Af (alpha-f in the diagram) with the front wheel. You should assume that the length of the axle between the wheels is a known, fixed quantity L. Theta, of course, is (90-Ar) degrees.

First, set up a convenient coordinate system for this robot. Within your coordinate system, what are the coordinates of the vehicle's instantaneous center of curvature? At what speed does the rear wheel need to rotate in order to keep up with the front wheel (to minimize wheel slippage)?
An important quote to keep in mind is
the following, borrowed from roboticist Erann Gat's quote collection:
Furious activity is no substitute for understanding.
Of course, furious activity might lead to understanding -- in which case
it would be considered a good thing. But it is a also good idea to step back
and reflect on a project even while you're working on it... .
This part of the project will vary according to the platforms used and the tasks that they're seeking to accomplish! More detail will be worked out on a team-by-team basis. However, a few guidelines apply to all:
I would encourage you to consider a website layout in which your HWs and project progress are organized and accessible - several of the previous projects had easy-to-use layouts you might consider. Creativity (or, perhaps, creative copying) is welcome for your website layout. Using a wiki is great.
The following is a rough, general guide to putting together a technical report on a robotics project, e.g., for submission to a conference. Particular projects may omit some of these points and include others. (Most will be very similar for the first half of the term, however!) You don't have to have all of this right now, but you should have a paragraph of Introduction/Vision, a half-page (at least) of Progress, and some example Media.