CS 154 Homework #3
Due Wednesday, February 17
Readings for HW 3:
Modular Robot Climbers by Nadeesha Ranasinghe, Jacob Everist, Wei-Min Shen,
Proceedings, IROS 2007 Workshop on Self-Reconfigurable Robots.
Short-answer questions
Each team should "submit" these simply by posting them to an appropriate link, page, tab, or area of your CS154 wiki.
Short-answer question #1 Stepper Motors
The example stepper motor shown in class had 4 teeth on the stator and 2 on the rotor. The angle that that motor turned for each full step was 90 degrees. A full step is considered the smallest (nonzero) angular turn that causes two teeth on either side of the rotor to align with two teeth (also diametrically opposed) on the stator. For example, the diagram below shows four consecutive full steps of 15 degrees each in a stepper motor with a six-toothed rotor and eight-toothed stator.
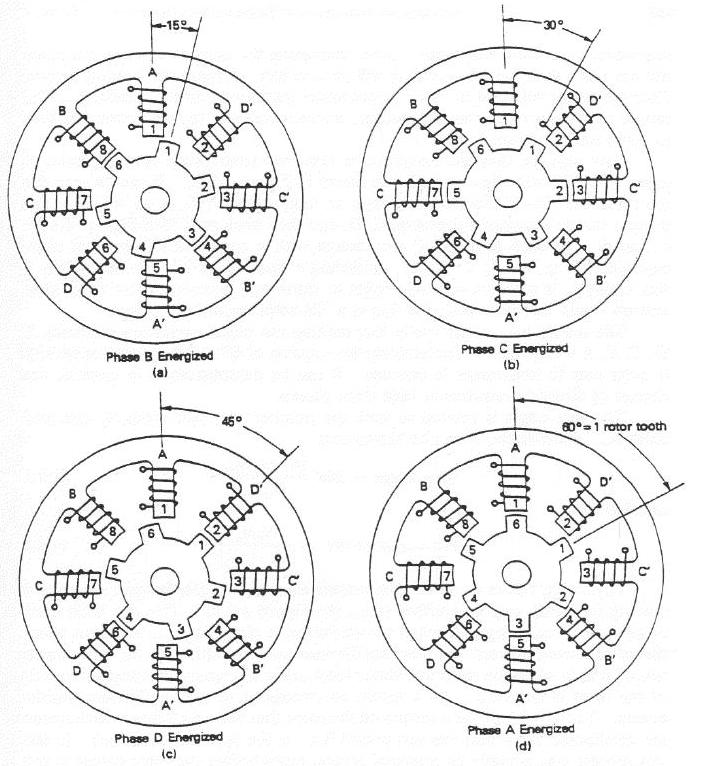
Part A How large is the full-step angle in a stepper motor with R rotor teeth and S stator teeth? Note that you may need to consider separate cases, depending on the values of S and R. You may assume, however, that S is an even number greater than 4 and R is an even number greater than 2. Why would the motor not be very useful if If S == 2 ?
Part B A typical commercial stepper motor offers a full-step resolution of 1.8 degrees. What would you guess are the number of rotor and stator teeth on such a motor? In particular, try to minimize the total number of teeth needed to achieve this resolution. After all, fewer teeth mean simpler construction and control.
Short-answer question #2 Servo Motors and their gearing
PART A
A typical, inexpensive servo motor might have a 180-degree range of motion. One such hobby motor (they're typically only $10 each) is disassembled in a plastic bag in the robotics lab. This question asks you to determine how many rotations of the motor shaft are required to attain the full 180-degree range of motion that the end-effector (the output shaft) actually exhibits.
In essence, this is only a gear-ratio question, but because the system of gear-reductions is so compact, there is an additional puzzle element here: you'll have to determine how the gears interact, because the pieces are partially disassembled in the bags. You don't need to actually count gear teeth (feel free to use variables to represent their number of teeth), though you're welcome to count them too -- it's not easy, however!
PART B
There is a second box/bag with a partially-disassembled gear train in the lab -- this one has a wheel from an iRobot Roomba inside it. For this gear train, determine how many rotations of the servo motor are required in order to turn the Roomba's wheel one full revolution. Explain the ratios involved.
Short-answer question #3 Mobile Robot Kinematics
PART A
Tricycle-style robots avoid the "caster wheel" problem that differential
drive robots have: that wheel can cause slippage or other difficult-to-model
effects. (The Segway avoids the problem in an entirely different
manner!)
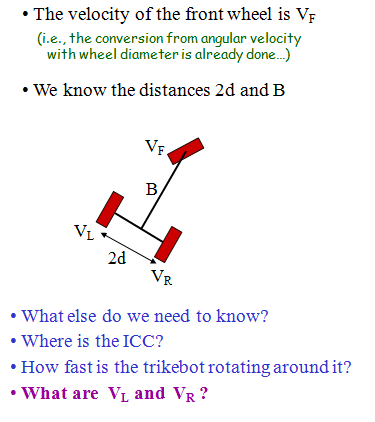
For this problem, describe the kinematic relationship among the components of the
tricycle-style robot in this diagram. The goal is to describe the velocities of the rear
wheels, VL and VR in terms of the known quantities: Vf,
V, d, and the current turning angle of the front wheel.
PART B
Consider a two-steerable-wheel bicycle sketched in the figure
below. Unlike ordinary bicycles, here the front wheel is powered (with
a velocity of Vf), while the rear wheel
is free to roll to keep up. Both wheels have radius 1. However, both wheels can be
steered independently, so that in a general configuration, the
frame could form an angle Ar (alpha-r in the diagram) with the
rolling direction of the rear wheel, and it could form another
angle Af (alpha-f in the diagram) with the front wheel.
You should assume that the length of the axle between the wheels
is a known, fixed quantity L. Theta, of course, is (90-Ar)
degrees.

First, set up a convenient coordinate system for this robot. Within your coordinate system, what are the coordinates of the vehicle's instantaneous center of curvature? At what speed does the rear wheel need to rotate in order to keep up with the front wheel (to minimize wheel slippage)?
Lab Project update for HW 3: Demo!
For this short assignment, there is no formal write-up for the projects and their progress. However, each team should set up a short meeting time to demonstrate the current state of their platform... I look forward to chatting with each team about the next steps to take -- those steps will be part of Hw#4.