CS 154 Homework #6 - a motion-planning challenge...
Due 11:59 pm, Sunday, April 18, 2009
A high-DOF motion planning challenge
For this part of the HW, you should use the files in the following link:
motionPlanning.zip
That archive contains a variant on the Python simulator we have used thus far, with
a 6 DOF manipulator in place of the familiar Roomba-like platform.
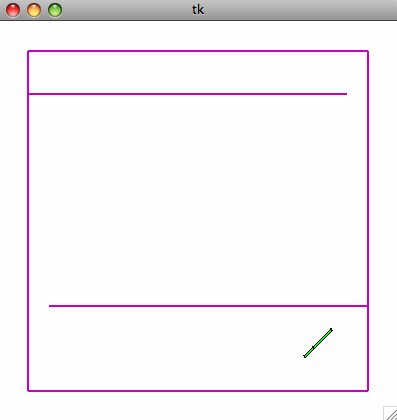
For this problem, you may use any strategy you'd like to create a general-purpose
motion-planning algorithm for this arm. In particular, your planner should be able to
navigate the arm from its initial position in the lower right-hand corner to a
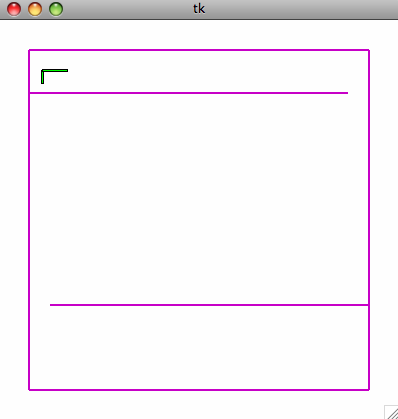
final position in the upper left. The exact pose in the upper left is not crucial, but
the robot should be contained in the bounding box formed by (-400,400) and (-350, 350) -- that is,
in the upper left 50x50 box:
Your algorithm will be tested in this environment, as well as a couple of others. You may assume, however, that all environments will be contained within a bounding box from (-400,-400) to (400,400), just as this one is. robot's initial position will be specified, exactly as in the file above, and the goal positition will be to get to the upper 50x50 box, again as above. The obstacle lines may change, however!
Constraints!
The only constraint on your robot in this problem is that you need to keep the lengths of the two links at
least as long as they are at the start, i.e., 30cm for the first link and 60cm for the second, outer link.
In essence, this means there is no need to change the link lengths at all, as there is no advantage to
increasing the lengths!
As for approaches, both randomized algorithms (such as RRT) and deterministic algorithms (Voronoi or spatial decomposition)
are welcome. Once your algorithm finds a path, you should show the robot traversing that path.
There is code present that will
indicate if any obstacles are hit... perhaps it's worth mentioning that you shouldn't remove that code! :-)