-
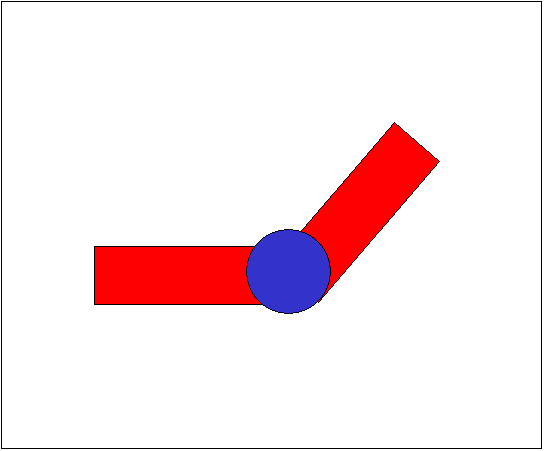
Annotate the figure above using DH notation using variable names for
link lengths (li) and angle (θi). Clearly identify
how these lengths and angles are measured in the figure. (All joints rotate about <0,0,1>.)
-
Write the end effector position and orientation in terms of the link lengths and angles.
- Download the IK skeleton project, unzip it and compile.
-
The first step is to implement the computeGlobals function. This function computes the global angles of the links. The global angle of link i
is the angle the link makes with the neutral position of the root. The function also computes the global positions of the ends of the links.
(You'll need to use the global variables linkLens and numLinks.)
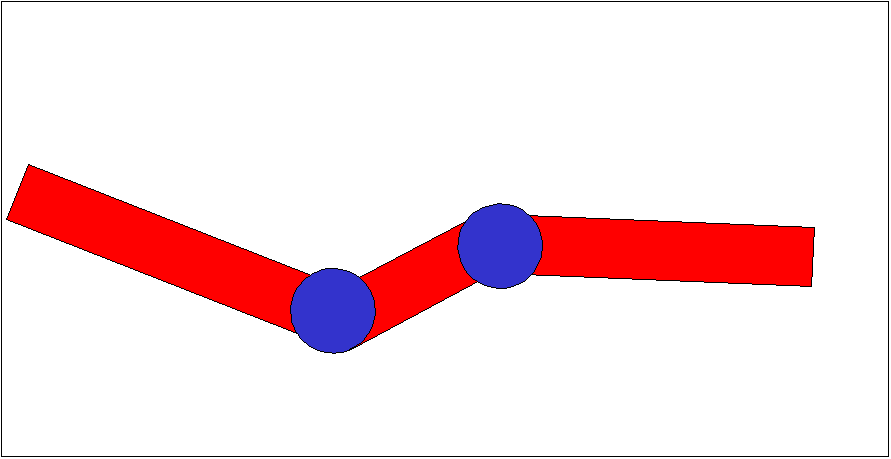
Once you've completed this function the program should display the inital
link configuration with lengths each equal 10 and angles π/2 and 3π/2.
-
Next you need to implement the computeJacobian function using the algorithm we discussed in lecture. Store the Jacobian in the global variable
J.
-
When the user drags the end effector, the move function is called. The move function first calls the computeJacobian function. Next it calls the computePseudoInverse, which computes the
pseudo-inverse of the Jacobian, and stores it in the matrix Jplus. If J is invertible, then Jplus is its inverse. If J is not invertible, but
dS = J dθ has a solution, then Jplus dS = dθ.
The pseduo-inverse function has been written for you!
-
You do, however, need to compute dθ based on ds=[dx dy] and Jplus.
Next you want to compute the new position of the end effector give the change in angle dθ.