Monte Carlo Localization
Daniel Lowd
CS154: Robotics
Overview
I implemented the Monte-Carlo localization mostly as described, but
with a few modifications. First, in my normalization code, I
generated uniformly distributed random particles if for some reason not
every particle was assigned. (In my first implementation, I would
sometimes end up with a few particles at (0, 0), because they hadn't
been assigned new locations.) Second, I decided to determine and
display the average absolute and overall errors on the particles after
normalization. This way, I could get an objective sense of the
precision and accuracy of the code. I coupled this with a hack
that would place the robot automatically in four consecutive locations,
rather than relying on keyboard movement or mouse placement, to generate
statistics on the effect of different actual and modeled noise levels.
Since this was somewhat beyond the scope of the project, I did not
follow through to completion. I observed, for example, that the
accuracy and precision would vary from run to run, but I did not attempt
to describe that distribution, only gain some intuition into the effects
of the different factors. I did these experiments with the simple
square map using 100 particles and had pretty good success.
Qualitative Analysis
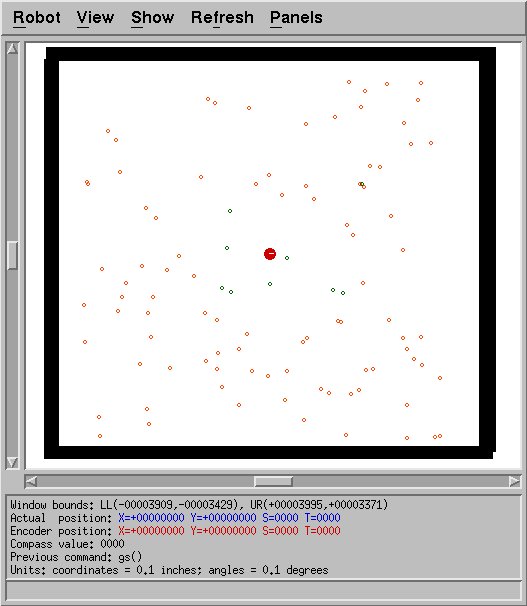
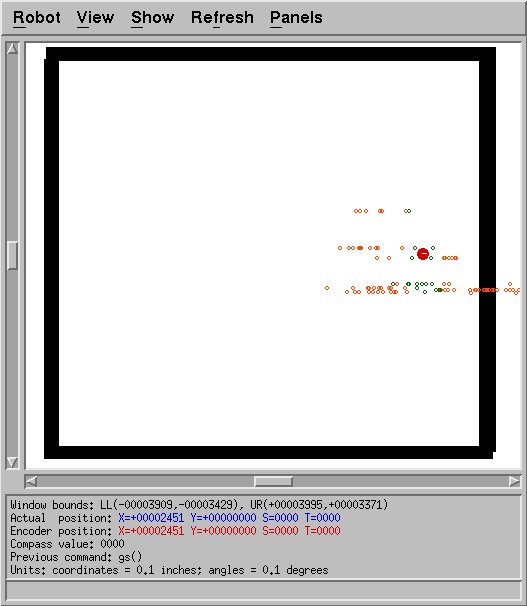
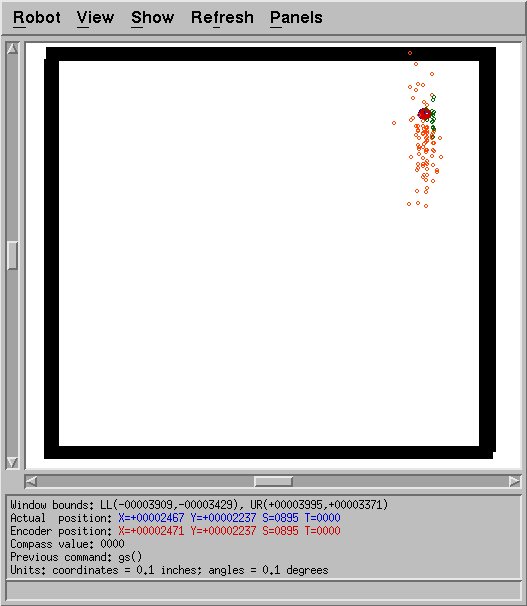
With actual and modeled noise of 10.0 inches (standard deviation), the
localization performs pretty well. The following screenshots show
some of the progression when running the robot in part of the loop, but
done by mouse. The darker colored circles are the particles
selected by the algorithm. The lighter colored circles are too
unlikely and thus being cut.
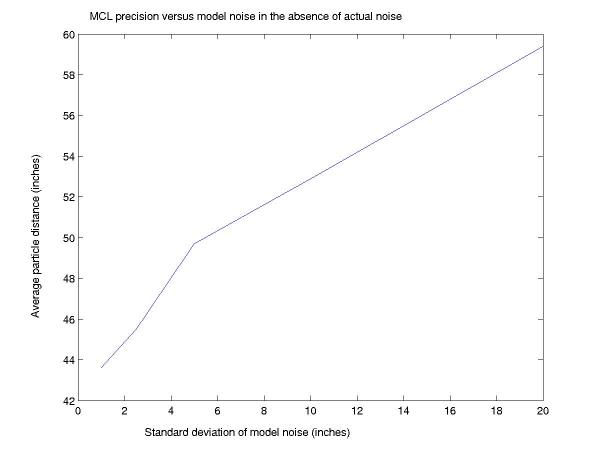
Quantitative Analysis
Through automated experiments, it was possible to gain a more precise
understanding of the relationship between precision and noise.
When there was no noise introduced to the sonars, less noise in
the model yielded more precision, when measured in terms of average
distance from the true location to each particle after a certain amount
of localization.
With noise of standard deviation 10.0 inches, the graph looks somewhat
different:
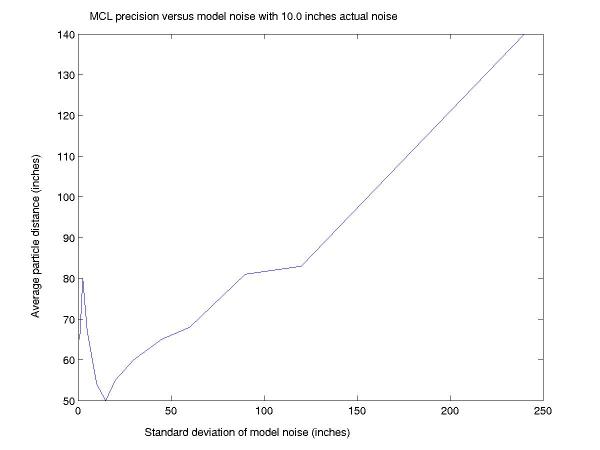
Here we can see that underrepresenting the noise has detrimental
effects, even in a simple box-like room. However, overrepresenting
the noise does lead to less precision, as before. It should be
noted that this is precision, not accuracy. Though not shown here,
accuracy tended to be very good for the case with no noise across all
variation of model noise. For the case with noise, accuracy was
good with noise modeled at the actual level of the noise or somewhat
greater, even up through 120 inches of noise. 240 inches was too
much to effectively localize, which makes sense, since the maximum sonar
value is 255.
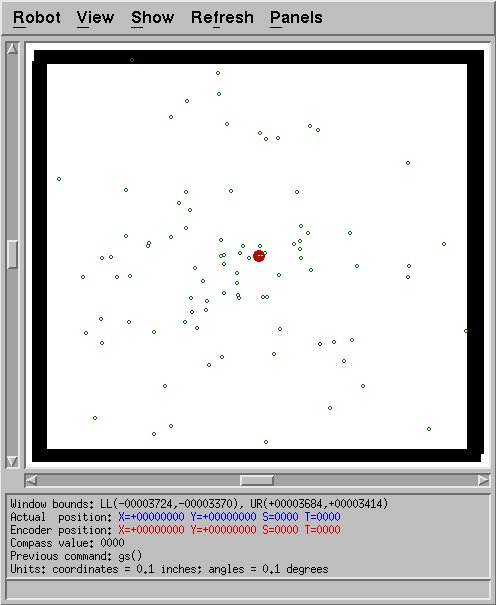
An example of this failure can be seen below. While the average
location of the particles is somewhat near the robot's actual position,
it's still pretty vague. More discerning localization is more
effective than this.
Maze Challenges
The maze map, unfortunately, proved to be much more challenging.
Given the complexity of this map, I did not attempt to do testing
as automatically or methodically as with the simpler one. Simply
to be able to consistently localize would be considered a victory.
It was only with lower levels of noise that I was able to manage
this. (Alternately, more particles might help, but I did not
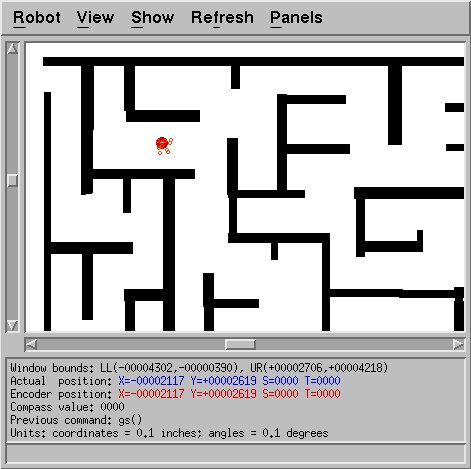
experiment with that.) The following image shows an example of
successful localization, but just barely. 10 inches of model noise
but no actual noise were used, with 100 particles. Even with these
parameters, it nearly failed based simply on initial particle
placement. Of the nearby particles, only one ended up being
identified as useful, and most of the likely clumps of particles were
quite far away. It should also be noted that knowing where the
robot really is and letting that information influence the next
placement of the robot really is cheating, and probably makes this
method work better than it otherwise would. A true test would be
to implement entropy-seeking behavior or to place the robot in a random
location and show a human only the particles.
Source Code
mcl.cc -- Complete source code to my implementation
of the Monte-Carlo Localization code.