|
CS 154 - Lab Projects
Marissa Anderson . Josh Kline . Matt Levinson
Matt Livianu . Chuck Matlack . Eric Wu
Project 3: BotBall
Intro
The culmination of our robotics efforts this term will be to build a HandyBoard/RCX platform for the collegiate BotBall tournament. The BotBall platform requires a number of challenging processing tasks, even though the game itself is simple.
Midpoint Goals
- Playing field construction
- Playing field navigation
- Obstacle avoidance
- Ball recognition
Final Goals
- Ball manipulation
- Task choosing
- Speed optimization
Midpoint Report
We've made progress on constructing the playing field and have begun brainstorming playing and design strategies. We are currently planning on using both an RCX and a HandyBoard robot, since our team is fairly large and the rules of the game allow us to use both platforms simultaneously.
The playing field is mostly constructed. At the moment we are missing a foam ball basket, the bottom surface, zone lines, and some paint.
We're making progress on navigating the playing field, although without a complete board, not every aspect of navigation is represented. During our group work session, we worked on the construction of an RCX bot that will push the ping-pong ball nests around the playing field (if we push the nests to our side of the field, we score).
Obstacle avoidance is out of scope, since in this setting we want to move toward obstacles. Instead we are going to implement wall-following, as soon as the playing field is completed. This should be a fairly easy task, since the board boundaries are color-coded in black and white.
Our current scoring strategy is to use the RCX bot to push the ping-pong ball nests over to our side of the board, while using the more complex HandyBoard platform to construct a bot that searches for the most valuable foam ball, the green one, and places it into the basket.
Recognizing the foam balls using the CMUcam was our most challenging task. The cam was intermittently having signal problems, making it difficult to test. When working correctly, it can search and detect orange and blue colors, and even estimate the size and distance of colored objects.

|
The partially constructed playing field.
|

|
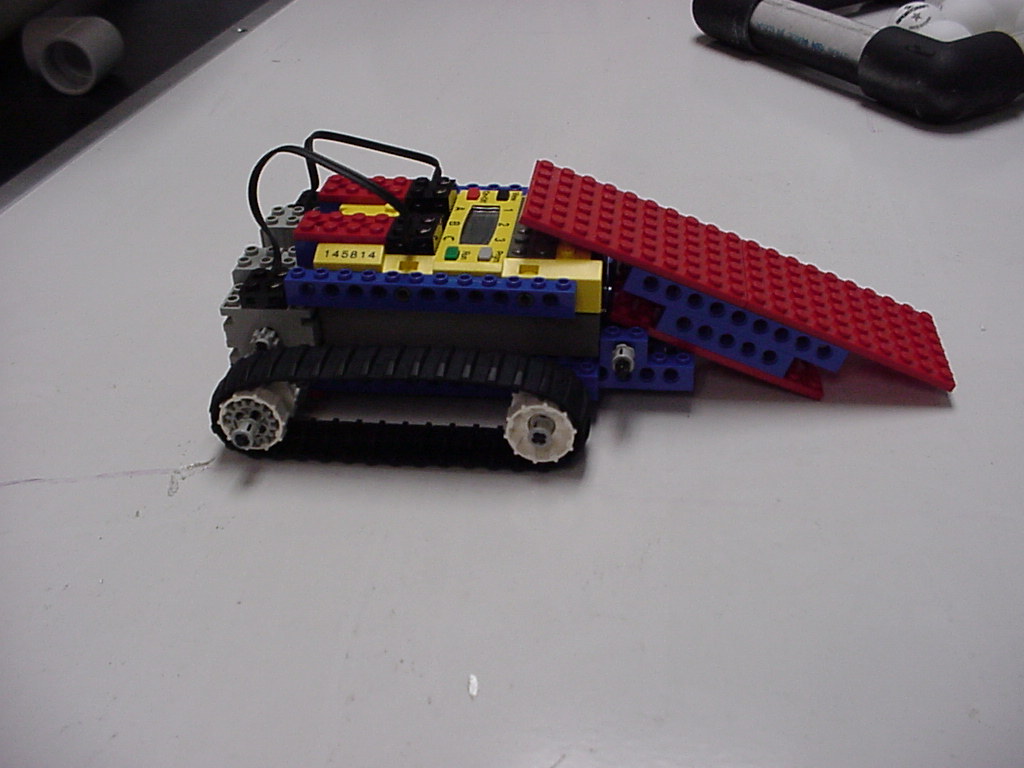
The RCX "push" bot.
|
|