Nomad 200
Brie Finger
Jessica Fisher
February 16, 2003
Avoidance Software
Introduction
One of the most fundamental problems in robotics is developing robots
that can navigate through the world without damaging themselves or
others. There have been many different approaches to accomplishing
this task dating from the early days of robotics (such as the Stanford
Cart experiments and "Shakey" the robot). In order to solve
higher-level problems, test robots must first be taught to safely
move through their world.
The goal of this project is to program the Nomad 200 to travel through
the Libra Complex. The Nomad 200 has arrays of sonar and infrared
sensors mounted on a turret, which can be used to navigate around
obstacles. The Nomad has three synchronized wheels, which are
controlled by a single rotational/translational velocity parameter or
an angle/distance parameter. The Nomad is limited to traveling on
relatively flat ground, unlike such robots as the PolyBots[1], which are designed to mimic natural creatures
and travel over diverse terrains.
In this portion of the project, we have programmed the Nomad to
wander through a map (following corridors) without running into
obstacles. Eventually, we
would like the robot to be able to get from its current location to an
arbitrary location, given a map of its surrounding area. We are using
a simulation
program to test our code without risking damage to the robot. The
code can then be downloaded onto the robot to test in real-world
situations.
Background
The first approach to robot navigation/architecture was the
Sense-Plan-Act (SPA)
approach[2]. In this method, the robot develops a representation of the
world around it using sensors ("sense"), makes a plan of action based
on this representation
("plan"), and carries out that action ("act"). The main problem with this
approach is that during the time when the robot is planning, the world
may change significantly (i.e. if there are moving elements in it).
However, this approach was used somewhat successfully by researchers
at Stanford, although it was most successful in very simple human-made
"worlds."
Rodney Brooks took a new approach to robot architecture with the
"subsumption" method[3]. Brooks advocated the
development of insect-like robots, which reacted in direct response to
sensor input (eliminating the "plan" stage). Such robots would have a
default "wander" behavior that was "subsumed" by behaviors such as
"run away" if the robot got too close to an obstacle. The problem
with this method is that the more things that the robot is capable of,
the more complicated the subsumption design gets, until eventually a
limit is reached. The can-collecting robot developed in 1988[4]
is considered to be the extent of what can be accomplished with this
architecture.
More recently, Erann Gat described a three-layer architecture, which
includes elements of both SPA and subsumption[5]. In this approach, the robot has a "Controller,"
which implements low-level behaviors, a "Sequencer," which determines
the order in which to carry out those behaviors, and a "Deliberator,"
which makes high-level decisions based on current and past states.
The first task researchers developed for each of these architectures
was simply to have the robot navigate the world around them.
Higher-level tasks (such as collecting Coke cans, etc) all depend on
the robot's ability to avoid obstacles. Our project will provide a
base from which higher-level functionality can be implemented on the
Nomad 200.
Approach
 Our method is
modeled on three-layer architecture. The Controller in our case
consists of low-level wall avoiding and
corridor-centering behaviors. The Sequencer determines which of these
behaviors should be followed, based on sensor input. As of yet, we have
no Deliberator, but we intend to continue development by adding in
high-level maze navigation, which will
become part of the Deliberator.
Our method is
modeled on three-layer architecture. The Controller in our case
consists of low-level wall avoiding and
corridor-centering behaviors. The Sequencer determines which of these
behaviors should be followed, based on sensor input. As of yet, we have
no Deliberator, but we intend to continue development by adding in
high-level maze navigation, which will
become part of the Deliberator.
Our first
goal was to program the Nomad to move around and avoid obstacles
(low-level wall-avoidance). The
approach we took was to test the short-range infrared sensors
for nearby objects, and have the robot turn away from them. We
only examine the front half of the infrared sensor array
because we have the turret and wheels coordinated (i.e. the robot is
always moving "forward," or away from obstacles detected by the rear
array). We set a "threshold" variable to represent the closest the
robot should get to an object without taking evasive action. When the
robot has crossed this "threshold," it will slow and turn away from
the object. The speed of rotation is inversely proportional to the
distance from the object, and the forward velocity is directly
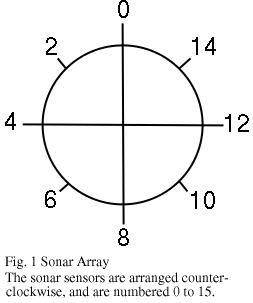
proportional to the distance from the object. If infrared sensor 0 is
triggered, the robot will
slow dramatically as it approaches the obstacle and will turn
counterclockwise. If infrared sensors 1 through 3 are triggered, the robot
will slow somewhat and turn counterclockwise. Finally, if sonars 13
through 15 are triggered, the robot will slow somewhat and turn
clockwise.
On top of this low-level wall avoiding, we have added a layer of control to
help center the robot between walls (corridor-following). This is
done by the use of proportional control
based on the difference between the distance to the walls on either
side and the angle at which the robot is moving relative to these
walls. The first type of error ("A") we examine is the difference between
the distance to the left and right walls, as measured from sonar
sensors 4 and 12. The second error ("B") we examine is the difference
between the sonar readings for sensors 13 and 11, which will let us
know the robot's approximate angle relative to the right wall. Based
on the relative sizes of these errors, we set the robot's rotational
velocity in order to direct it toward the center of the corridor.
In our implementation, we have attempted to prevent the robot from
angling itself too sharply to get to the center of the corridor,
because sharp angling will lead the robot to overshoot the center and
oscillate back and forth.
If the robot is closer to the right wall than the left wall, we have
several subcases to examine.
- If the robot is much closer to the right wall than the left, but
is not angled very sharply away from the wall, we direct the robot to
turn toward the center of the hallway (i.e. counterclockwise) at a
rotational velocity proportional to error A.
- If the robot is much close to the right wall than the left, and is
already angled fairly sharply away from the wall, we simply allow the
robot to continue on its course, rather than having it turn more
dramatically.
- If the robot is close to being directly between the two walls, we
have three more subcases.
- If the robot is angled too sharply toward the left wall, we set
its rotational velocity clockwise (proportional to error B) to
compensate and prevent it from overshooting too far.
- If the robot is at a small angle, we allow it to continue on its
course.
- If the robot is not heading toward the center of the hallway, we
set its rotational velocity to turn back toward the center,
proportional to error A.
The controls are analogous in the case that the robot is closer to the
left wall than the right wall. If the robot is directly centered, we
want to allow it to continue forward without turning. In order to aid
the corridor-following behavior, when the robot is initialized, we
direct it to rotate until it is parallel to the nearest obstacle.
Progress
We have programmed the robot to avoid obstacles while
wandering through its world. Some parameters used (such as the
threshold, default velocities, or proportional constants) provide drastically
different results when changed slightly.
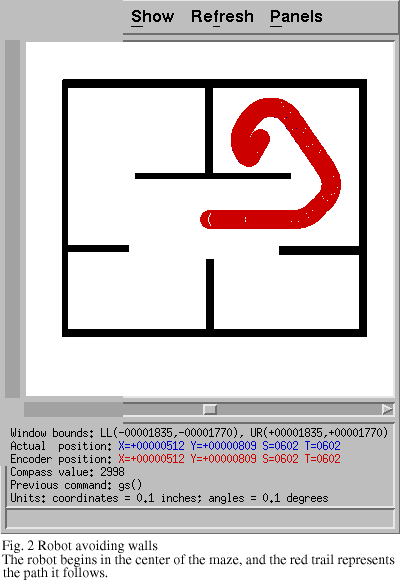
After the first week of work, the robot was able to avoid most
obstacles, but had difficulty avoiding
the corners of rectangular objects. At this point in our work, we had
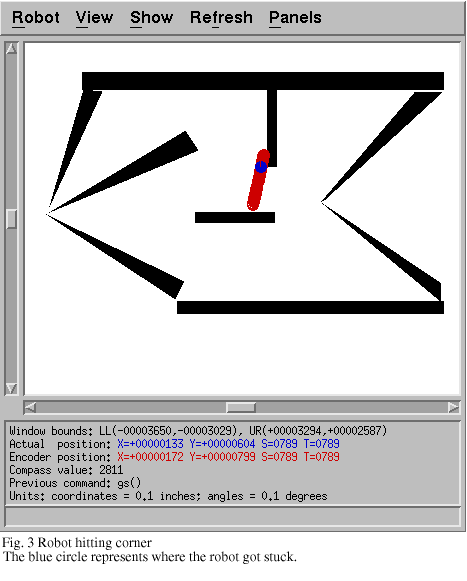
only programmed the low-level wall-avoiding behavior. Figure 1 shows the robot
successfully avoiding walls, while Figure 2 shows the robot getting
stuck on a corner. It seemed to be the case that the infrared sensors have
difficulty detecting pointed objects, but we later discovered that
there had been mistake in our reading of the sensors, and in fact we
were not ever reading sensor 15. This was caused by the use of an
incorrect offset value into the robot's State array, which resulted in
reading all of the infrared sensors off by 1. This explains the robot hitting
corners, because it always hit on the corner where sensor 15 would
have detected the obstacle.
After fixing this during week two, the robot stopped running into corners.
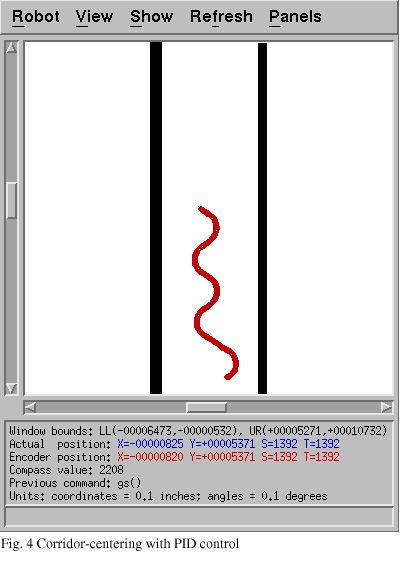
We then added support for the long-range sonar sensors. The input from the
sonar sensors is used to assist the robot in staying in the middle of hallways
(or in the most open space available). We experimented with PID
control using the position-relative commands available for the robot
rather than the velocity commands. During this stage, the robot (as shown
in Fig. 4) continuously oscillated side to side down the hallway. It
later became evident that this problem was likely due to the
implementation of the position-relative commands. Rather than
directing the robot to turn 5 degrees to the left, each time the
command was sent the robot would attempt to turn 5 more degrees to the
left from its current position. We later abandoned this approach for
a method based on setting the robot's rotation velocity.
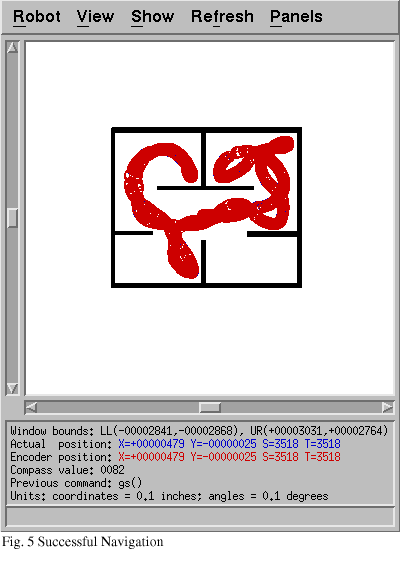
However, using the position-relative approach, the robot was
able to explore a room without hitting obstacles (Fig. 5), although a
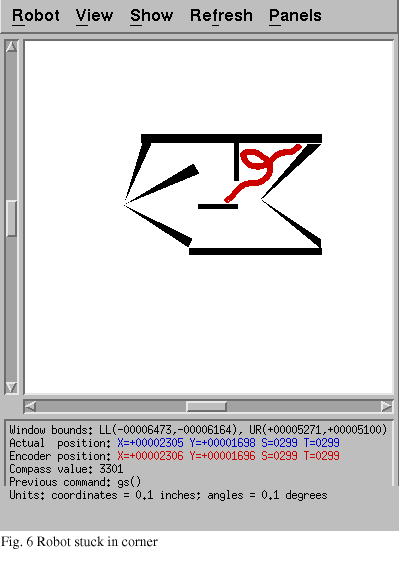
problem arose when the robot got into a corner (Fig. 6). The primary
problem is in the short-range wall-avoidance behavior. The robot senses the
wall on its right, and begins to turn counterclockwise; it then senses the
other wall on its left, and attempts to turn clockwise. As a result, the robot
becomes "stuck" in the corner, attempting to turn first one way and then
the other but never getting out. The problem is exacerbated by the
corridor-centering technique, because the angled walls in the map led the
robot to attempt to center itself between the angled walls, heading straight
for the corner. When it got to the corner, the short-range behavior took over,
and was unable to get out. This problem is still present in the final
version of our programming although it is not always repeatable, and
it appears to only be a problem when navigating between sharply angled walls.
To solve this problem, we could change the low-level behavior so that if
the robot gets too close to a wall, it gets passed a negative velocity and
simply backs away from the wall. This then introduces the problem of how to
make sure the robot does not start for the corner again as soon as it
is far enough away. However, since most worlds do not have such
angled walls, we are temporarily overlooking this issue.
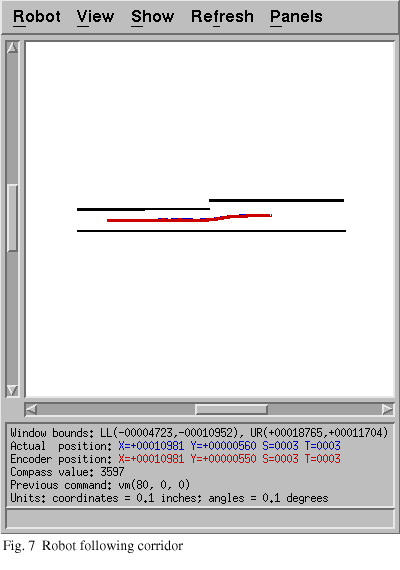
In our third week of work, we developed a new version of the
corridor-centering behavior, as described in the "Approach" section.
With the new settings, only proportional control is used rather than
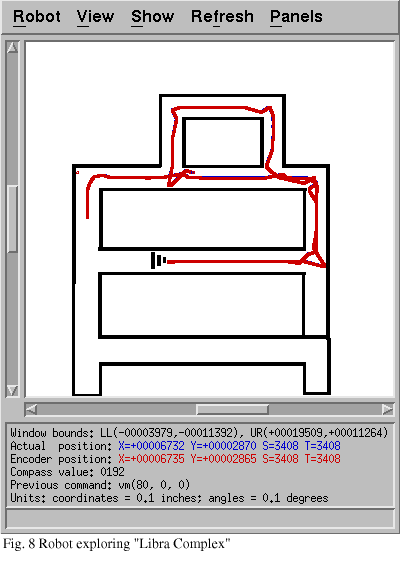
PID control. With the latest settings, the robot is able to
successfully explore a map without hitting anything, and maintains its
position in the center of the hallway as long as possible. The
major problem the current program has is related to turning corners.
The lack of a decision module for corner-turning results in the robot
getting "confused" about which way to go in an intersection. With the
current implementation, depending on timing the robot may either turn
a corner or continue straight if that is an option. There may also be
a problem in a situation where the robot is in a "room" rather than a
"hallway." In this case, the robot may center itself in the room, but
likely would not be able to find a doorway. This may be solved by
implementing a wall-following module in addition to the
corridor-following function. Wall-following would also produce a
simple way to avoid the corner-turning problem. However,
wall-following does not seem to be the most intelligent approach to
navigation in a given map, which is our future goal. It seems that it
might be more useful to follow a corridor and make a decision at the
corner rather than simply following the walls until getting to the
desired location (which would take much longer).
Perspective
Overall, the Nomad is currently able to successfully navigate basic
maps, maintaining a good distance from most obstacles and never
actually hitting anything. The robot still has some problems with
turning corners efficiently and with navigating rooms with sharply
angled walls (although this problem does not seem to be reliably
reproducible). One of the key factors in assuring that the robot does
not ever hit obstacles is the use of a "buffer" zone, such that when
the robot gets within a certain distance of an obstacle, it will
completely stop moving and turn to a safe direction. With respect to
the corridor-centering behavior, a key element is detecting how
sharply the robot is angled to minimize the amount the robot
overshoots its target.
Adding more behaviors would improve the system. First among these
additions would be the introduction of a corner-turning behavior and a
deliberative layer to determine which direction to turn in an
intersection. Also, the addition of a secondary wall-following system
would be ideal for the situation in which the robot is in a large open
space. In this case, the wall-following behavior would be "turned
on," and the robot would continue in one direction until encountering
a wall to follow. This would allow the robot to reliably find an exit
from a room.
In conclusion, the current system provides a stable foundation for
expansion toward navigating to a specific point on a given map. With
some minor improvements and additions, this expansion should be within
our grasp.
References
1. Yim, Mark et al. "Walk on the Wild Side: The
reconfigurable
PolyBot robotic system." IEEE Robotics and Automation Magazine: 2002.
2. H. P. Moravec. "The Stanford Cart and the CMU Rover."
Proceedings of the IEEE: 1982.
3. Brooks, Rodney. "Achieving Artificial
Intelligence through Building Robots." Massachusetts Institute of
Technology: 1986.
4. R.A. Brooks, J.H. Connell and P. Ning. "Herbert: a
Second Generation Mobile Robot." MIT: 1988.
5. Gat, Erann. "On Three-Layer Architectures."
Jet Propulsion Laboratory, California Institute of Technology: 1998.
Acknowledgements
We would like to thank Prof. Zach Dodds for his assistance.