Final Project: Inverted Pendulum Robot
Matt Ferlo and Jordan Taggart
Abstract
We attached an inverted pendulum (constrained to one degree of
freedom) to the Evolution platform. We succeeded in tracking the
angle of the platform and developed a sophisticated model that would
allow the robot to balance the pendulum. Unfortunately, when these
systems were integrated, it was discovered that the robot was only
able to make approximately two updates per second—not fast
enough for it to keep the pendulum upright. We believe that our
approach is sound; having a faster camera and faster access to the
motors would have resulted in our success. Success might also have
been achieved with a pendulum with more weight; however, we were not
able to test this.
The remainder of this report is divided into the following sections:
Pictures
Presented here in chronological order
| Photo Gallery |
Behold, the inanimate
carbon aluminum rod! |
 |
|---|
The hinge we attached it to.
The hinge was attached to the
frame by velcro, but ended up duct taped, as well. |
 |
|---|
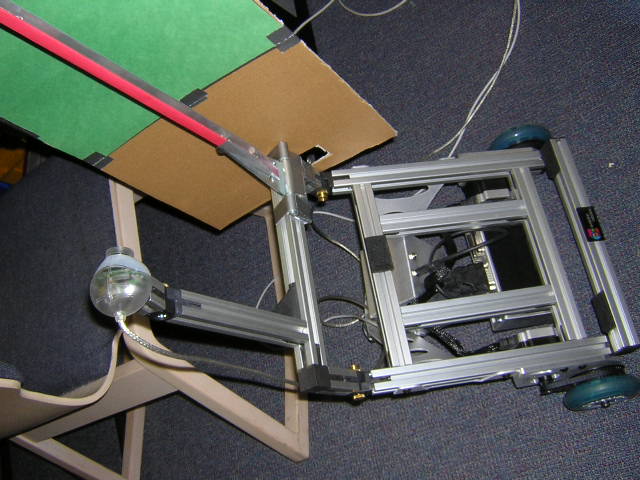
| The testing setup |
 |
|---|
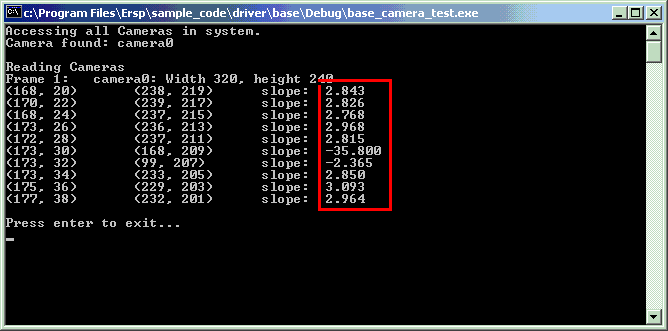
| The camera's view of the test setup |
 |
|---|
And the result.
Note that most of the slopes were close,
while a few were way off. Also, our up and down are reversed, so the
slope should be negative. |
 |
|---|
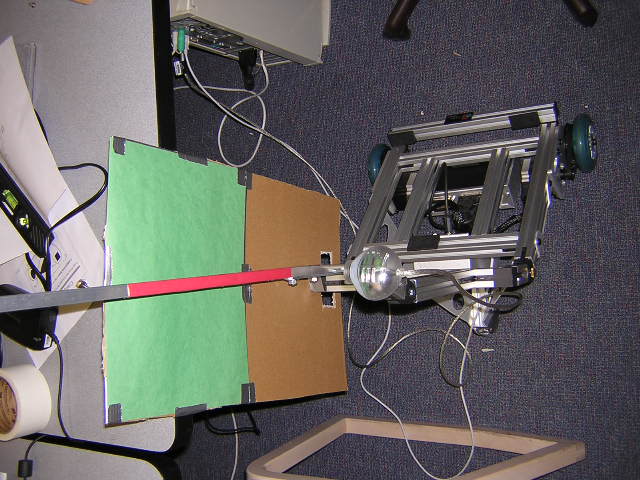
| The camera's view of the final system. Note the green
background contrasting with the red pendulum. |
 |
|---|
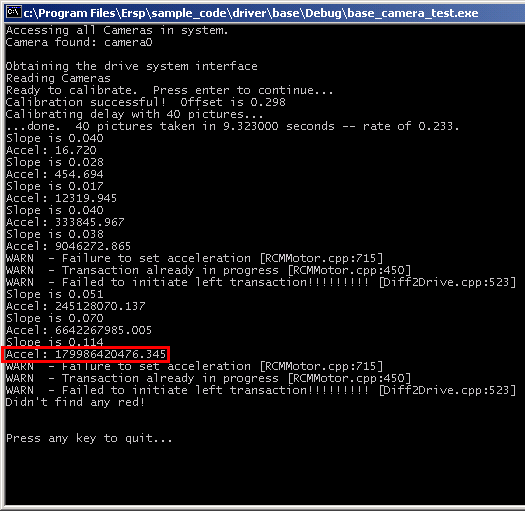
A few mis-typed constants into some matrices resulted in some
rather excessive accelerations. The units are in cm/s.
Had
the robot been able to sustain this acceleration, it would have
achieved light speed in approximately 1/6 of a second.
Surprisingly enough, this did not occur. |
 |
|---|
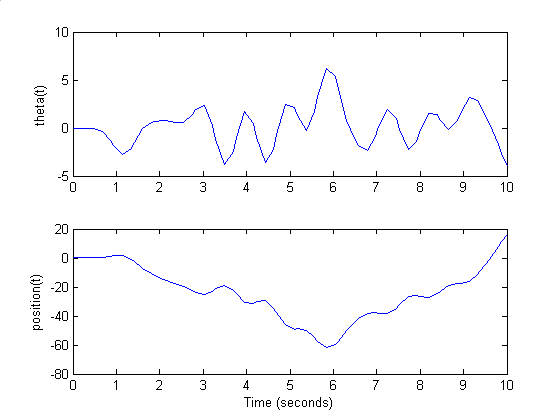
A simulation of how our system would respond given a sampling
rate of 2 Hz (which is approximately what it had).
Note that
the units for theta are radians; this means that the pendulum has
rotated nearly completely around. |
 |
|---|
| Our final robot |
 |
|---|