Independent of gravity, the motion of the cart to which the pendulum is attached will provide a force on the pendulum.
F = ρ*L*x''
Which results in a torque:
Tmove = 0.5*ρ*L2*cos(a)*x''
Total
The total torque on the standing rod is given by the sum of these torques. Because T=I*a'' (I = ρ*L3/3), this allows us to write the ultimate governing equation:
a'' = (3/2*g*sin(a) + x''*cos(a))/L
Approach
We will process the camera images to obtain the current angle of the pole. We will use this information in a feedback system to move the cart under the pendulum and stop its motion. Using modern control theory, we will be able to do this in the most optimum way, minimizing undesirable behavior and stabilizing it as quickly as possible. If we can obtain some estimates of the amount of process noise (wind and such) and the amount of measurement noise (how inaccurate our sensors are), we could use Kalman filtering to optimally stabilize it in the presence of this noise.
Sadly enough, many of the papers we have read for the class are completely irrelevant to this robot. It performs no mapping — so it will not use Monte Carlo Localization [Dellaert], nor other Markov-based probabilist navigation models [Simmons], nor DERVISH's relatively simpler model of the world [Nourbakhsh]. Our pendulum-balancing robot will be so simple as to essentially have one mode of behavior — balancing the pendulum — which makes subsumption architecture [Brooks] irrelevant. While Polly [Horswill] accomplished many things, balancing a pendulum was not among them (nor will our robot give tours). Finally, as our robot will not be humanoid, we will be unable to apply the exemplar-based learning approaches seen in [Drumwright].
There is one paper that will benefit us, however. As it did in the last project, [Mouravec]'s trials and tribulations with the Stanford Cart will remind us that, however bad things may get, they could get much worse.
| Photo Gallery | |
|---|---|
| Behold, the inanimate |
 |
| The hinge we'll attach it to. It is currently attached by velcro, but will probably end up duct taped... |
 |
| The testing setup |  |
| The camera's view |  |
| And the result. Note that most of the slopes were close, while a few were way off. Also, our up and down are reversed, so the slope should be negative. |
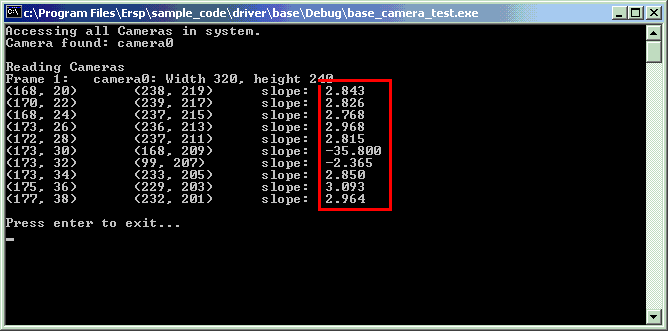 |
Bibliography
- Brooks, Rodney A. Achieving Artificial Intelligence Through Building Robots
- Dellaert, Frank et. al. Monte Carlo Localization for Mobile Robots
- Drumwright, Evan et. al. Exemplar-Based Primitives for Humanoid Movement Classification and Control
- Horswill, Ian. The Polly System
- Mouravec, Hans. PhD Thesis
- Nourbakhsh, Illah et. al. DERVISH: An Office Navigating Robot
- Simmons, Reid and Koenig, Sven. Probabilistic Robot Navigation in Partially Observable Environments
- Vaughan, Richard et. al. Experiments in automatic flock control