Here is our Assignment 10 Part II Problems 1 and 2. We solved the second problem in part II using pictures. Check it out!
|
|
Here's some live action shots of Picobot in action solving Maze #2. Don't forget to check out the source code for PicobotRules.txt on our Source Code page. |
|
|
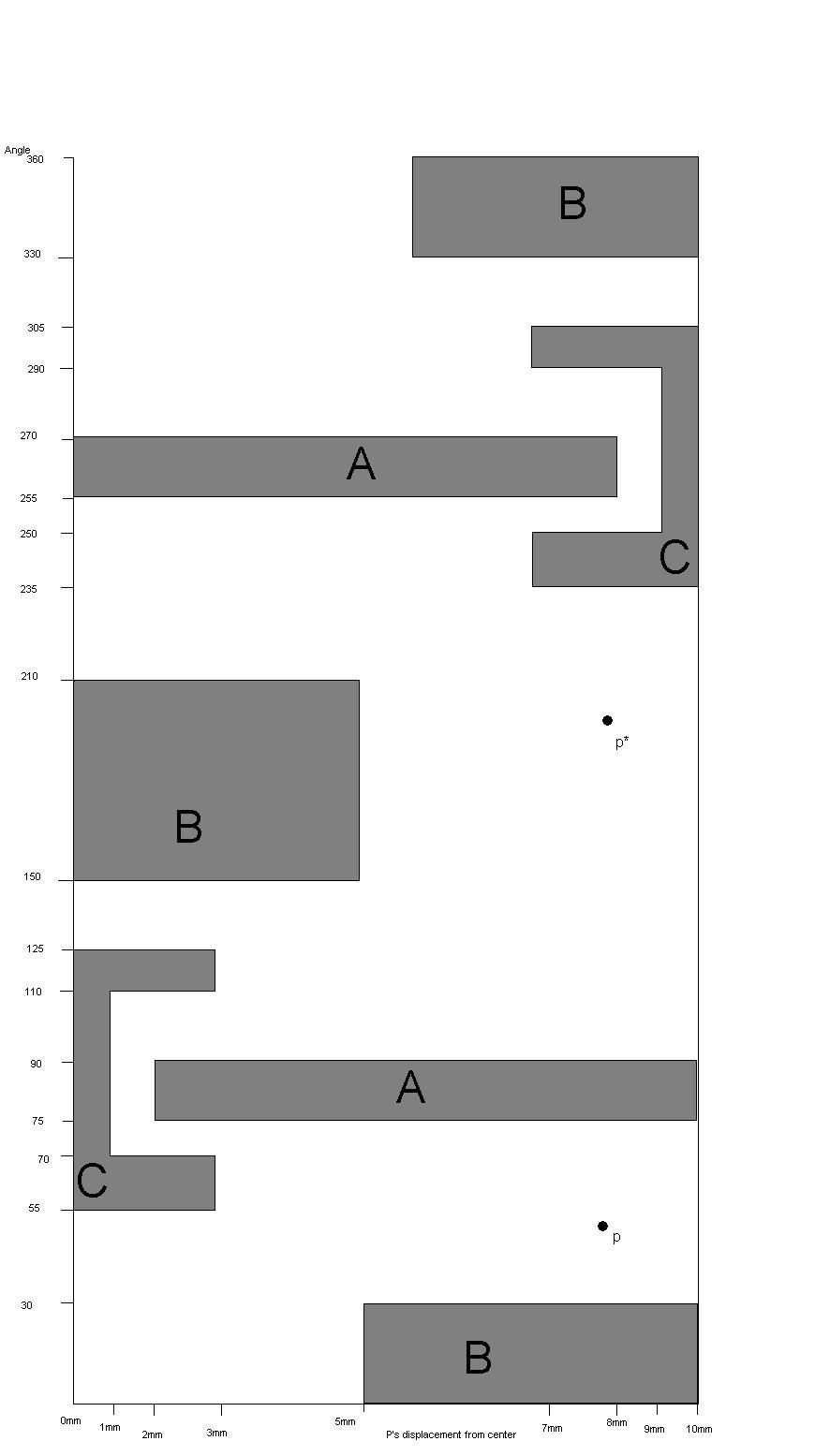
Here is our configuration space in JPG form. The obstacles are in grey. The two parameters we are working with are the radial distance that point p is from the center and the angle of point p. The angle is on the y axis from 0 to 360 and the radial distance is not on a linear scale, but goes from 0 to 10 mm. |
|
|
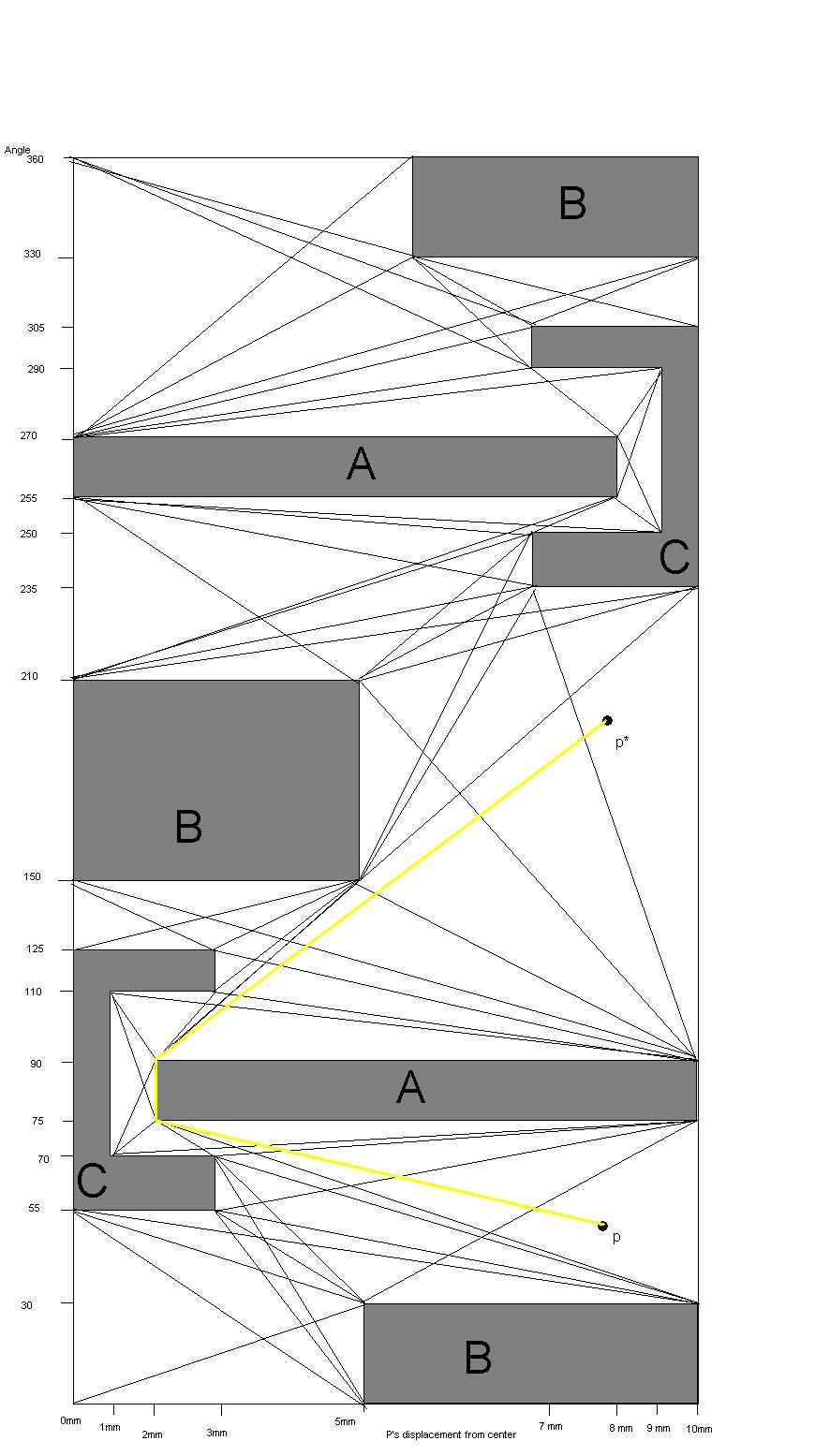
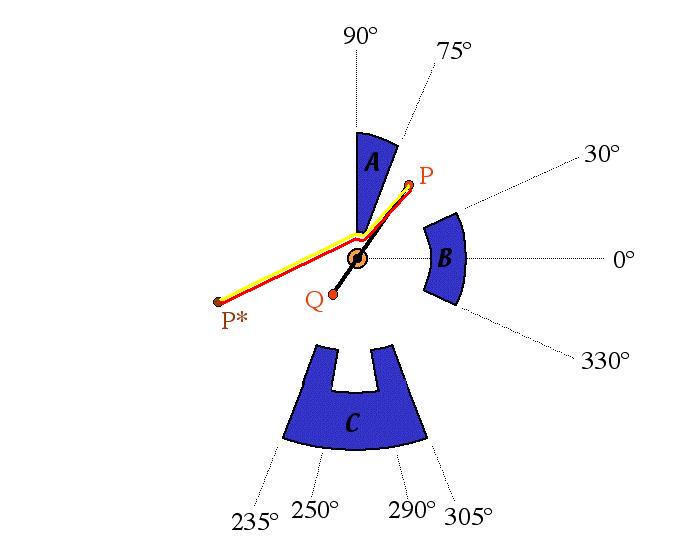
Here is the visibility graph we used. We drew lines from each vertex to every other visible vertex. Then we started from point p and headed to the nearest vertex. We followed the visibility graph until point p* was visible and then headed for it. (Note the path in yellow) |
|
|
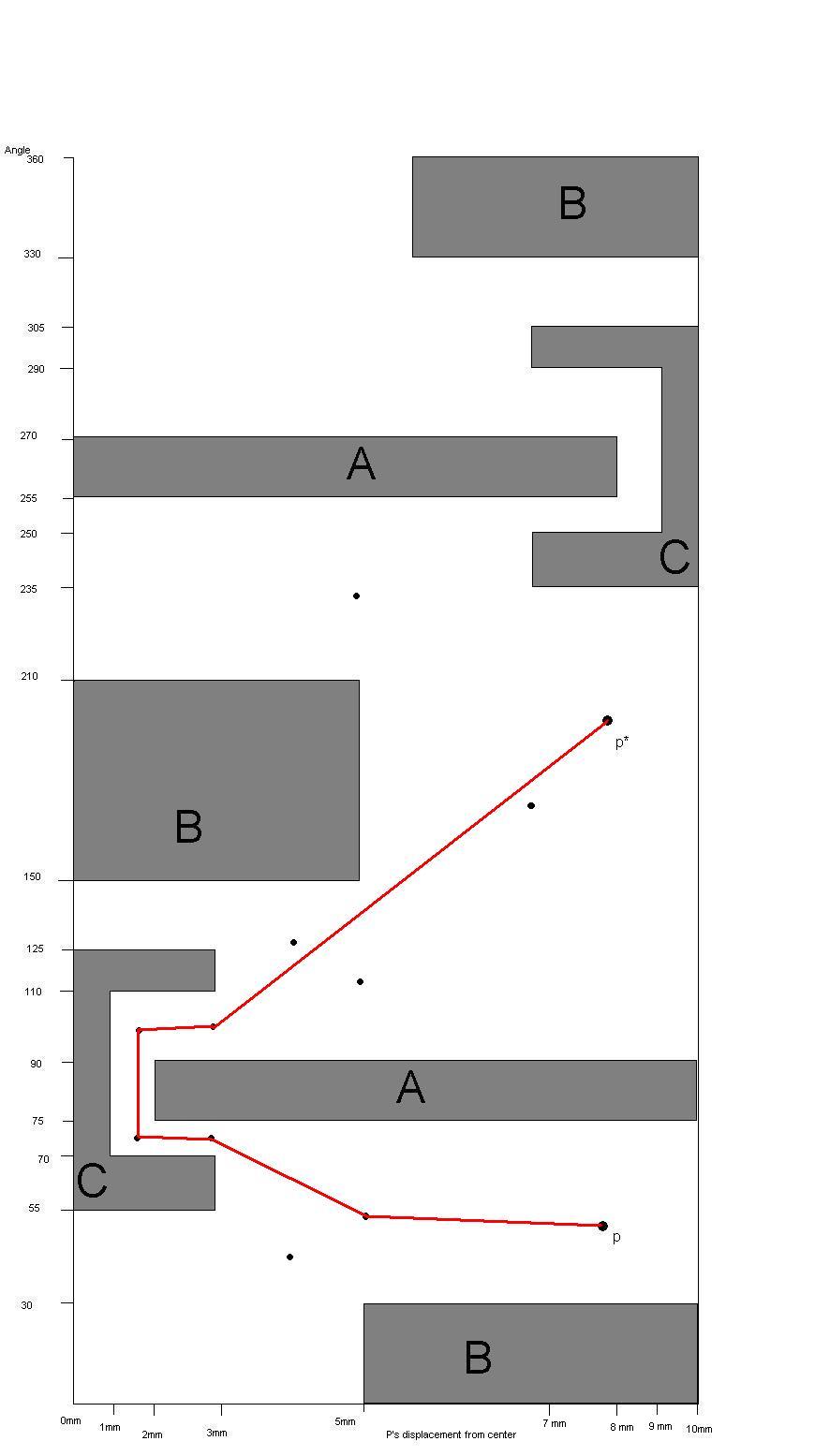
Here is a sketch of the voronoi verticies in the lower angles. These are the only ones relevant to getting to point p*. We connected the best verticies and drew the path in red. |
|
|
We took a copy of the real picture and drew in the visibility graph path in yellow and the voronoi path in red. There may be slight discrepencies between our path and the best actual paths, because our radial distance axis is not linear. Hopefully it's not off by too much. |