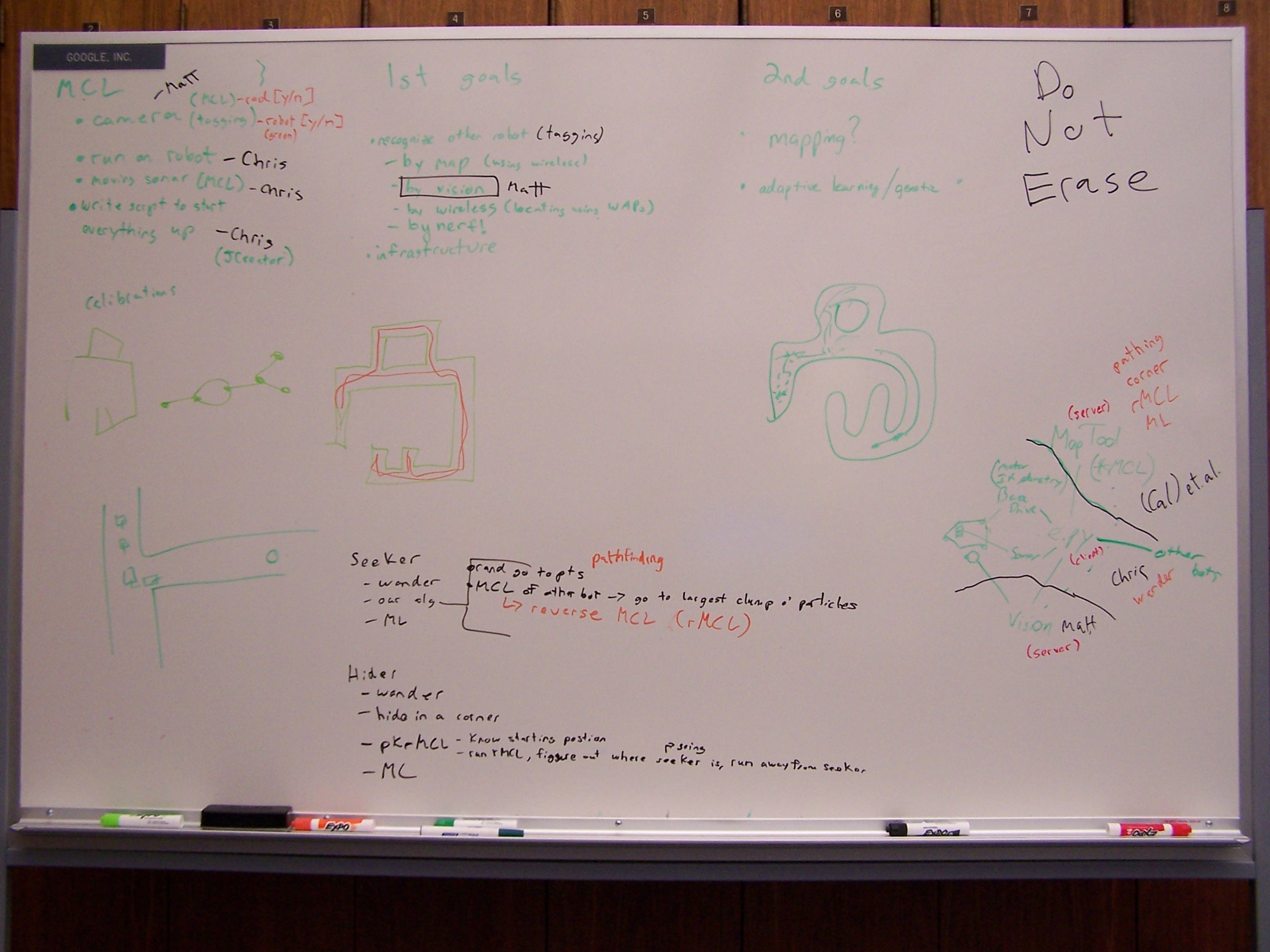
Initial Plans for Robot "Hide and Seek"
The raw ideas
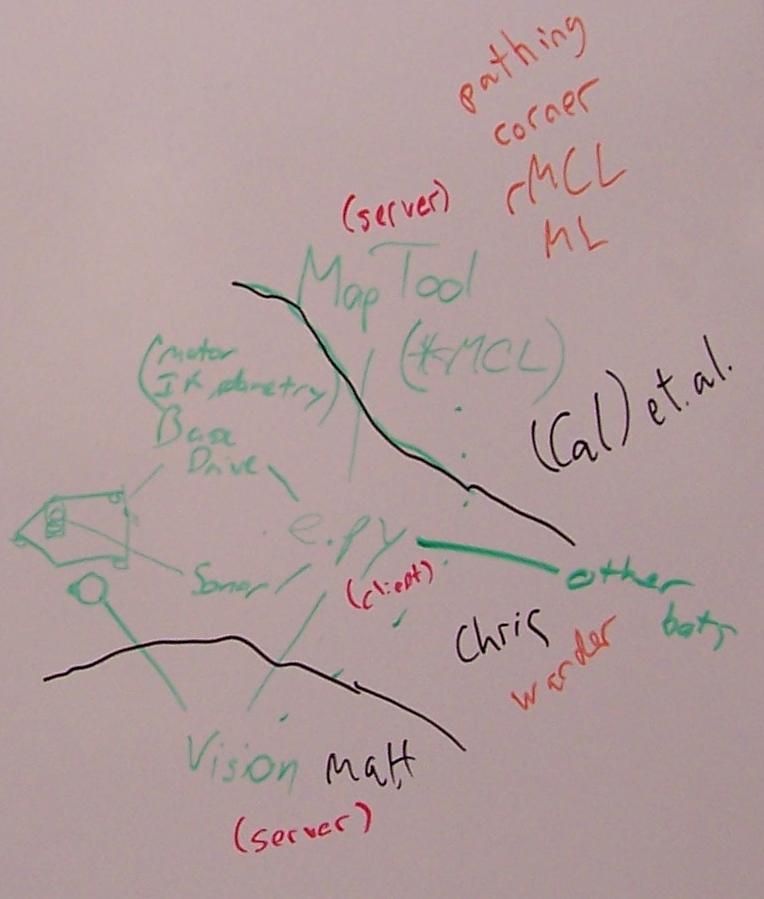
Close-up of software model
MCL finishing work: * camera (MCL - red y/n) (tagging - green y/n) - Matt * run on robot - Chris * moving sonar - Chris * write script to start all stuff - Chris * use calibrations 1st goals: * recognize other robot (tagging) - by map -* by vision - Matt - by wireless (using WAPs) - by nerf * infrastructure (big) - Chris 2nd goals: * mapping? * adaptive learning / genetic algorithms Seeker algorithms: * wander * random go to points (pathfinding) * rMCL (MCL of other bot -> go to largest clump of particles) * ML Hider algorithms: * wander * hide in a corner * pKrMCL - (know starting position; run rMCL, figure out where seeker is and where it's going, run away) * ML +- Vision other bots | | | Robot e.py -- MapTool | | | | | + Sonar + | | | + BaseDrive +
{kind=link}
{kind=link}