 The screenshot above is from a
simulation of this, as is probably evident from the dummy sensor data
output to the console.
The screenshot above is from a
simulation of this, as is probably evident from the dummy sensor data
output to the console.
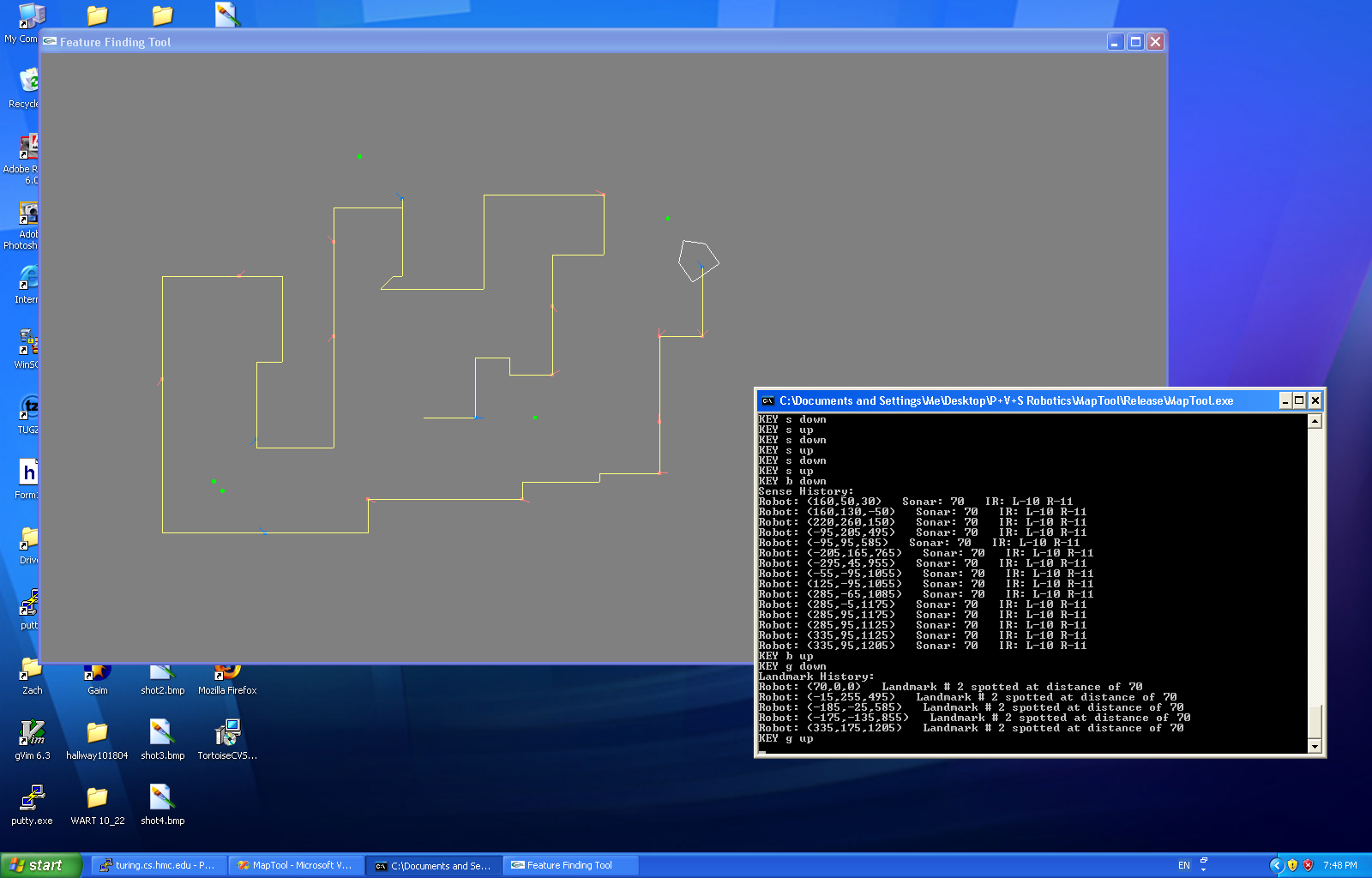
MapTool can now recieve information from the robot's central control program about spotting landmarks. It also now stores movement and sensor (sonar, IR) history for eventual construction of an evidence grid. The MapTool interface was updated as well. It now displays the robot's path (as reported by the odometry), places a red mark at locations where robot sensor information was collected, a blue dot where the robot was when a landmark was spotted, and a green dot where the landmark was reported to be.
The screenshot above is from a
simulation of this, as is probably evident from the dummy sensor data
output to the console.