As part of mapping, the robot needs to recognize landmarks, and
estimate how far away they are. For our purposes, we decided to use
artifical landmarks, which we felt it would be easiest to identify
without having to write some very complicated image processing code.
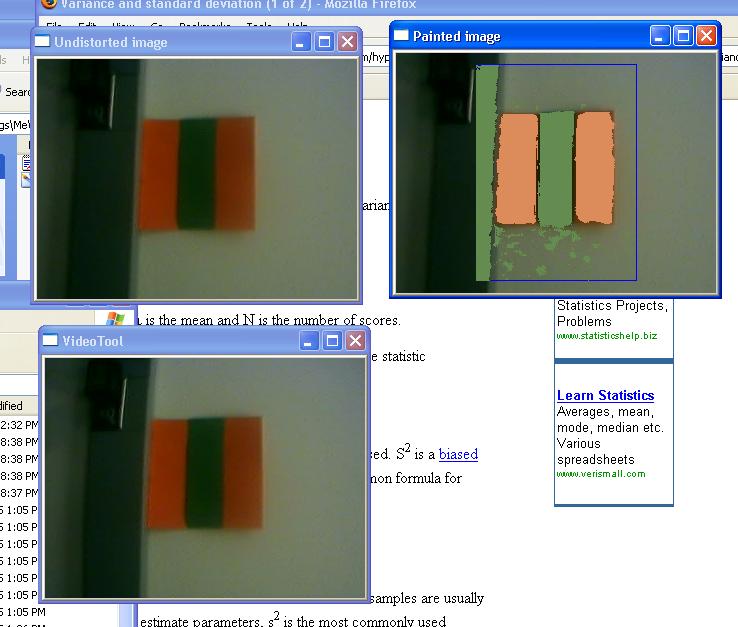
So the vision tool was modified to detect a landmark (orange stripe,
green stripe, orange stripe) and estimate how large it is (and thus
how far away). In the processed output, you can see where the code
thinks the landmark is with the bright pink line.
Doesn't it look pretty?
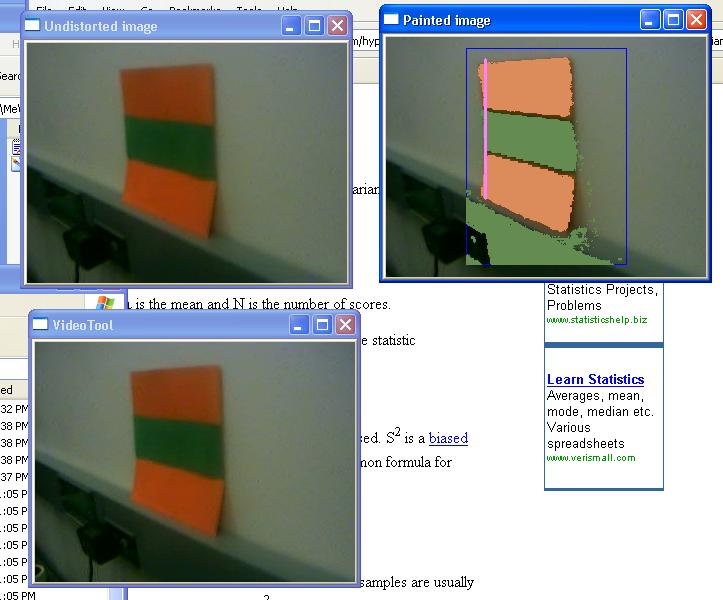
Even when we're not looking at it straight on, the landmark is still spotted.
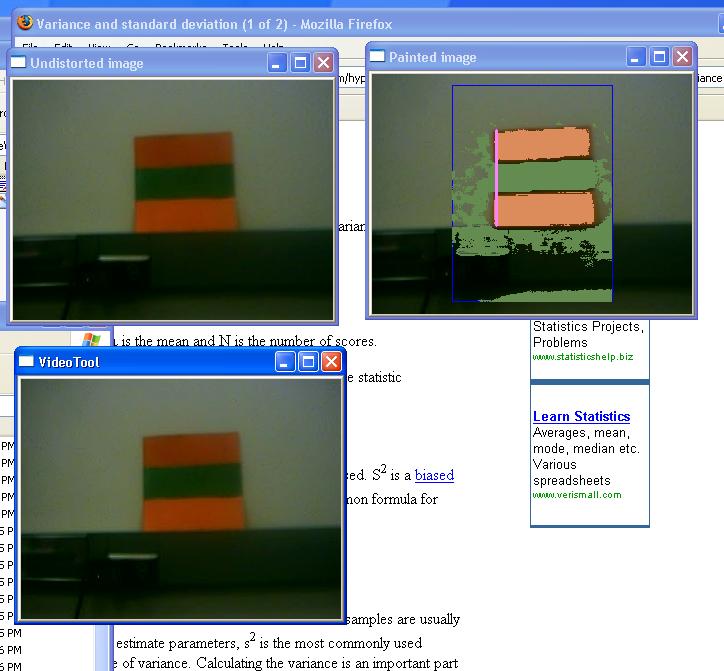
When part of the landmark is covered up, we still detect the rest of it.
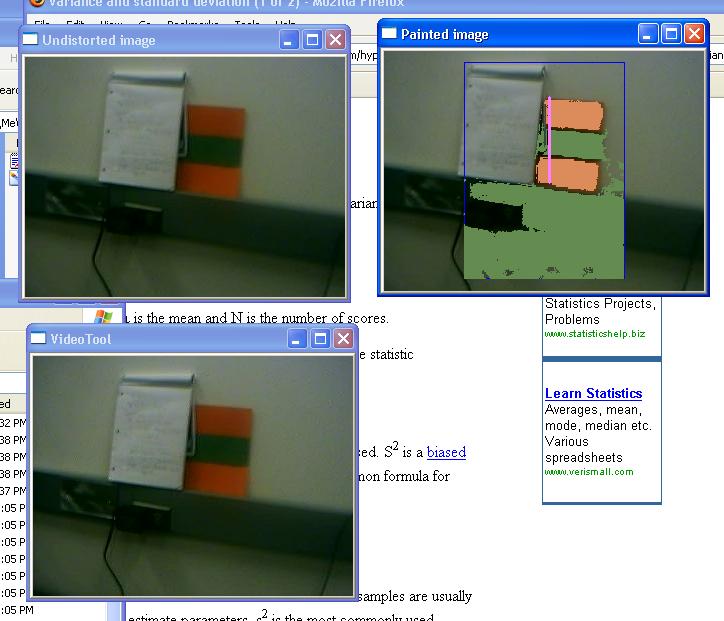
However, landmarks are only detected when the stripes are horizontal.