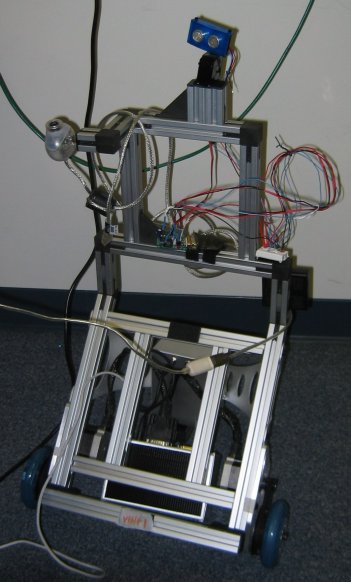
In order to mount the sonar unit, the robot needed to be redesigned.
We wanted to make sure that the camera wouldn't interfere with sonar
readings, and we wanted to make sure sonar readings could be taken in
all directions by only rotating the sonar motor. To do this, we
relocated the camera to the side, since it only needs to face
forwards.

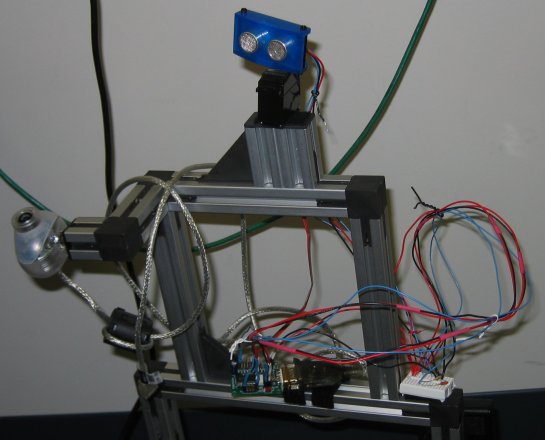
The sonar unit was stuck on top, thanks to the wonders of velcro.

More velcro was used to attach the battery pack, adapter, and breadboard, and we're good to go!
And a closer view of the attachment for the sonar unit.