Harvey Mudd College
Computer Science 154 -
Robotics
Assignment C
Lab #3 write-up
SooYoung Jung
04/02/01
Fire-fighting contest
Introduction
Because of the popularity of the annual robocup soccer competition, an
effort is underway to generate large-scale interest in other robotic tasks -- in
particular, marketable ones. For instance, this year's robocup will include a search-and-rescue
component. In keeping with this trend, your task in this assignment is to
build and program a robot that can rescue a victim from a burning house. In
addition, because two lab groups will be working on this project at the same
time, we will add a bit of (friendly) competition to the task, running the two
robots head-to-head at the time the assignment is due. (The inspiration for this
assignment is a yearly fire-fighting competition at
Trinity College in Hartford, CT.)
Task specifics
At the end of this lab assignment, we will fashion a "house" in the center of
the research lab (BK120) consisting of rigid walls and obstacles. The layout of
the house will not be known beforehand, but teams can count on the following:
- Except at wall junctions, there will be no walls less than 24 inches
apart.
- The house will be enclosed (so that the robot will not be able to wander
off into the space beyond the outer walls).
- The walls and obstacles will always run horizontally or vertically (in the
coordinate system of the outer walls). (Thus, they will always meet at right
angles, or as close as we can devise.)
- The walls will be one foot high.
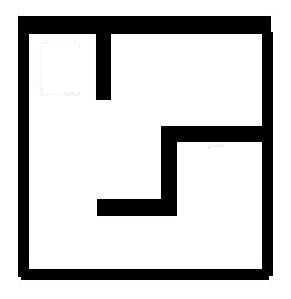
Here is an example of a
bird's-eye view of one possible environment (about 8' x 8'):
Some part of the house will be set on fire. Rather, to simulate this, a lit
candle will be placed on top of a six-inch platform either against a wall, in a
corner, or between two walls in the house. Thus, the height of the flame will be
six inches plus whatever the height of the candle is. (Leeway will be made to
raise or lower the candle if it's the "wrong" height for a particular mechanism
a team has constructed.) The robot will start in one of the four corners of the
house and will be aligned initially with the walls. The goal of the robot will
be to seek out the candle and extinguish it. Keep in mind that this is the
highest-level goal -- other goals include maintaining the robot's health and
keeping it from getting stuck.
Warnings These are general cautions that you should keep in mind
throughout this lab project.
- The robot should not push or ram any wall/obstacle continuously, i.e., the
intent is to keep the house in its initial configuration. If a robot seems to
be pushing against a wall, it will be reset.
- You may devise whatever mechanism you like to extinguish the candle, as
long as no water or fluids are involved and no harm comes to the
robot.
- In general, keep your robot safe! Each lab group is responsible for their
Handyboard, chassis, and sensors (all told, about $500).
- Do not use any glue or epoxy on your robot (tape is OK) -- keep in mind
that everything needs to be returned in its original state.
Equipment
The computational brains of the robots are MIT's handyboards, based on the 68HC11
microcontroller. Each team will have one handyboard (again, for which they are
responsible) and a copy of Fred Martin's technical reference for the handyboard.
In addition, each team will have at least
- Three lego motors
- Two light sensors
- One infrared sensor
- Three touch sensors
There are spare sensors and, perhaps, motors.
Teams may use those as they see fit. Finally, there is a pool of lego blocks
with which to build the body of the robot. These need to be shared between the
two lab groups working on this project.
Interactive C
The programming environment available for the Handyboards is Interactive C, for which an online
reference is available, as well as documentation in the Handy Board
Technical Reference.
What to do...
The first thing to do is to read the handyboard technical reference.
This is a must as it explains everything you will need to know about the board.
It is available here
in PDF format. In particular, be sure you understand how to keep the board
charged. You should leave your board in trickle-charge mode when not using it.
For safety, I would advise avoiding "zap" charge -- forgetting that a board is
"zap" charging can fry it.
From there, the project is wide-open. Some things to consider (and
references):
- There are a couple of books in the Research Lab that have some tips and
advice on lego construction. In particular, lego is not as strong or stable as
you might guess, and you will need to reinforce your chassis to hold the
Handyboard securely. Here is a link to a PDF file named The
Art of Lego Design.
- You will need to pay attention to the drive train of your robot. The lego
motors are high speed and low torque, so you may want to gear them down.
- Early on (even before a chassis is built) you should try out your sensors
and motors via Interactive C. That way, code development can progress in
parallel.
- Either the light or IR sensors (or both) can be used to detect the candle.
You might also want to use them for detecting if objects are nearby. You will
certainly want to use the touch sensors for that purpose. (Bumping objects is
OK, just not pushing them.) You can extend the reach of a touch sensor by
resting a lever against it.
The Contest
On the day the assignment is due (or the day after), each team will need to
schedule a time to demonstrate their robot's search-and-rescue performance.
There will be at least three trials for each robot on its own.
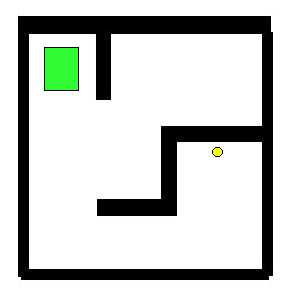
The first trial will involve a setup like the one below. This maze
will be available for testing at least a week before the end of the project. The
robot is indicated by the green rectangle (positioned upper left, facing toward
the wall at the bottom of the diagram), and the candle is represented by the
yellow circle (in the middle on the right).
The second trial will involve a similar set up, in that the maze and
robot starting position will be identical, but the candle will be in an unknown
location in the maze.
The third trial will involve an unknown maze (though not substantially
different from the one depicted above) and unknown positions for the candle and
robot.
Finally, if it seems feasible with the robot designs that the teams have
created, there will be a head-to-head run with both robots located in an
unknown (but symmetric) environment at equal distance from the candle.
In
each case, the robots will be judged according to these criteria:
- Does the robot drive without getting stuck or endangering itself?
- Can the robot find the candle and indicate that it knows that fact?
- Can the robot extinguish the candle?
- How quickly can it do so?
Grades on this assignment depend only on
a team's design and programming for their robot, not on the results of the
contest.
Write-up
In your write up, be sure to include at least a paragraph on each of the
following items:
- An inroduction explaining how you intended to approach the problem.
- A description of your design and any special characteristics of your
robot. Use pictures to help your description. There will be a digital camera
available in the lab.
- A description of your control program and its organization. Also, add a
link to your code.
- Problems you encountered and how you dealt with them.
- An evaluation of your system. (If you have pictures, again, you should
include them as further explanation.)
- (Optional, but appreciated) Any comments about how this lab assignment
could be improved.
Results
Problem Approach and description of program
Since there were not much sensors (I tried to limit the sensors and motors
as the project described) and smarter stuff that I can use in this project,
I decided to use an algorithm as simple as possible.
The algorithm goes like follow:
The robot will wonder the maze until it finds the candle. If the bump
senses while wondering, it will avoid against to the wall or obstacle and wonder
again.
When the IR sensor detect the flame, the robot will make left-right align,
and move closer to the candle and make left-right align again to the flame and
extinguish the flame.
Source code: sy.c
Extinguisher in action : ~~~.mpg
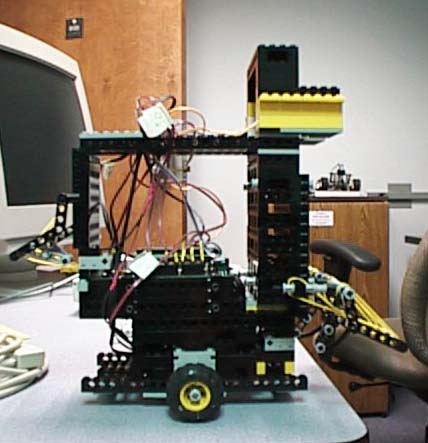
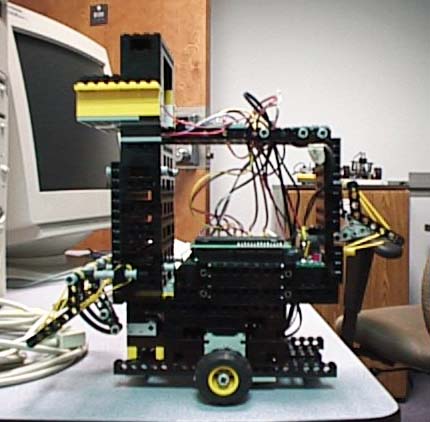
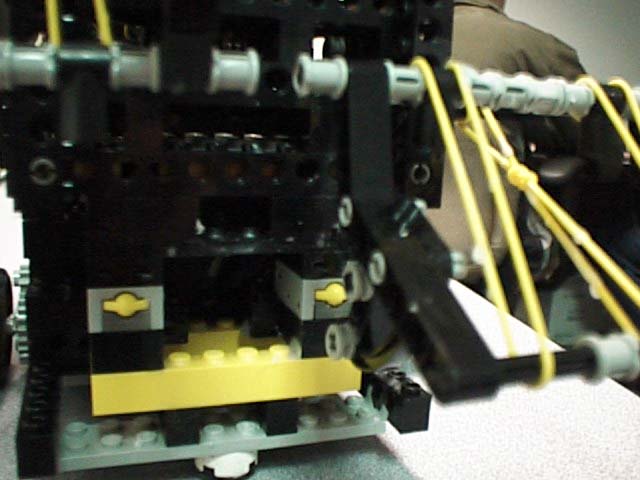
Characteristics of my robot and some pictures
Before the spring break, I tried to build the body, but it was my first time
use lego, so it was not really easy to figure out which is for which. So
I built over spring break and it took some times to figure out the function
of lego parts. The robot was composed with following:
- Three lego motors
- Left and right wheel are powered by these two motors
and the other one is used for fan.
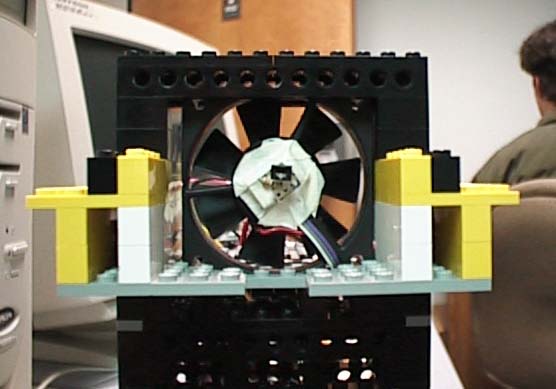
- Two light sensors
- They were used to align to the flame, but not at the final. They
are located at the left and right side of the fan.
This
two light sensors couldn't really detect the flame so I covered with lego
block so it can detect some of reflection from the candle. However,
they are very dependable to the size of flame and candle.
- One infrared sensor
- This detects the flame and located at the center of the fan.
- Three touch sensors
-
Two of them are located at the front and the other is at the back to sense
the wall. The motor were geared down to 3:1 so it can go fast but
not really high power but they are fine for this project.
- Bunch of lego blocks
Pictures
|
|
|
|
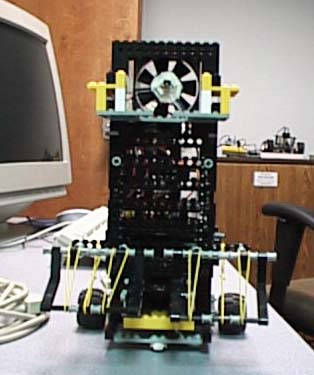
Front
|
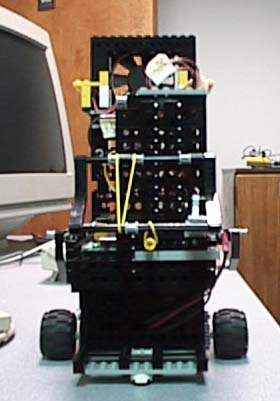
Back
|
|
|
|
|
Left side
|
Right side
|
|
|
|
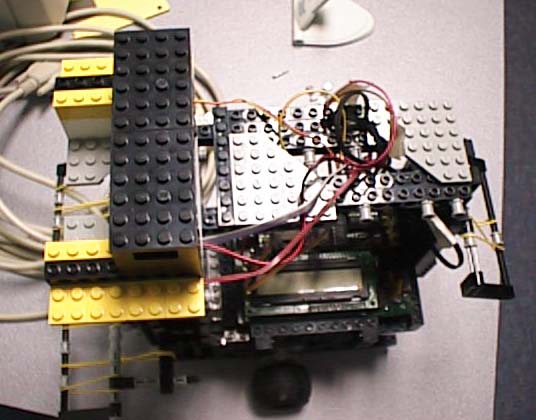
Top view
|
|

|
|
Bottom
Firstly made 4 wheels robot with powered both side
of back wheels but when it makes turn, it shakes because of too
much of friction from the wheels. The final verion has only
two wheels with both powered and round things (not sure the realy
name) at the front and back to reduce friction.
|
|
|
|
Handy board
|
|
|
|
Front touch sensors
|
|
|
|
Fan and two light sensors on each side
Two
light sensors are covered by lego blocks so it can really detect
the flame of the candle.
|
|
|
|
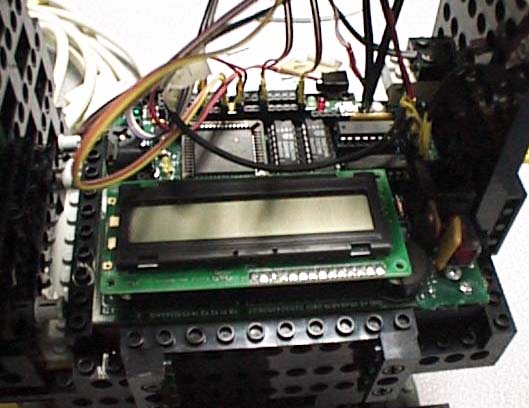
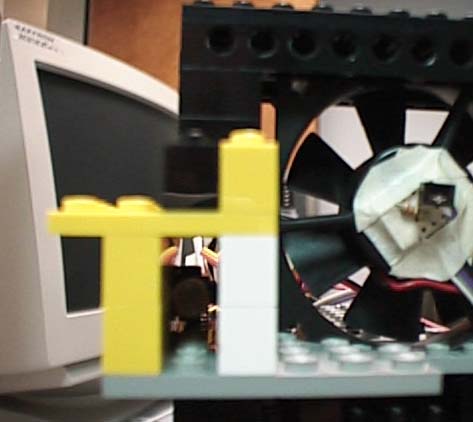
Closer picture of light sensor and IR sensor
at the fan
|
|

|
|
Light sensor is located at the center of circle
|
Problems and solutions
The most problem for this project was aligning the robot to the flame.
The first approach was using two light sensors to make the robot left-right
align to the candle. However, the light sensors were not good to detect
the candle location so I gave up with them and changed whole alignment function.
The second approach was using IR sensor to align to the flame and it worked
much better than light sensors. The robot will turn left and right and
store the value of previous IR sensor (before making turn) and current one (after
turing). These two values were compared and used to make the robot align
to the flame.
Final evaluation of my robot
The robot detects the candle well and the speed is pretty fast. Moreover,
the alignment was very accurate.
However, it was not smart enough to detect
candle faster. It just wonders the maze until it randomly detects the
candle. I firstly thought that I will put one IR sensor on left so I
could use wall following algorithm or maybe other algorithms. But I felt
that the IR sensor isn't too good to detect the wall and because of the fault
of motor (different power of motors for same input), I just decided to make
the robot wonders with a lot of luck until it finds the candle.