CS121 Project 2
Edge Collision Notes
A collision between a ball and a triangle can occur on the
triangle's face, edge, or vertex.
These notes describe an algorithm for detecting edge collisions. Separate
notes describe
face and
vertex collisions.
Detecting an edge collision is conceptually simple. The ball collides
with the edge when its center is a distance r from the edge.
We need to check if there are any points on the ball's path that satisfy
this condition and, if so, choose the first such point. As discussed
in the general collision notes, we only want to report an edge collision
that occurs
when the ball is moving toward the front of the incident triangle.
That means that the ball may collide with an edge shared by two triangles
and the collision is reported for one, both, or neither triangles.
(See Figure 1.)
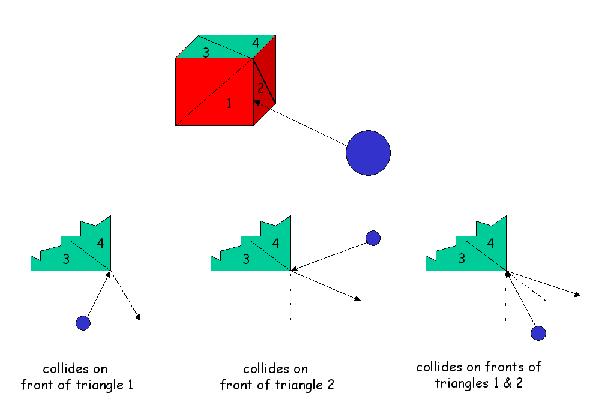
Figure 1
While our task is conceptually simple, the mathematics can get
messy and hard to implement. To make this process easier,
we begin by describing an edge collision detection algorithm for
a special case of edges. We then show how to use this algorithm
to solve the edge detection problem for arbitrary edges.
Standardized edge collision detection
Edge collision detection is simplified when the
edge is in a standard orientation.
An edge (
v0,
v1)
is in standard orientation if
v0
is at the origin and
v1
is on the positive x axis.
Let e=
(v0,
v1)
be an edge in standard orientation; i.e.
v0=(0,0,0) and
v1=
(x,0,0).
Let the starting and ending positions of the ball be
p0
=
(x0,
y0,
z0)
and
p1
=
(x1,
y1,
z1).
We'll first determine if there are points on the line L
through p0
and
p1
that are a distance r from the
x-axis (i.e. the line containing the edge). We'll
then analyze the points to determine if they constitute an edge
collision.
We can represent L
parametrically as
p0
+ β
(p1
-p0).
Each point on L corresponds to a unique value
of β. In particular,
p0
and p1
correspond to β=0 and β=1, respectively.
Points on L between
p0 and
p0
correspond to values of β between 0 and 1.
We need to consider two cases:
-
L is parallel to the x-azis.
If L is parallel to the x-axis (i.e.
y0=
y1 and
z0=
z1), then either the ball
is rolling along the edge or a collision, should it occur, is a
vertex collision. In either case we can report that no edge collision
occurs.
-
L is not parallel to the x-azis.
This is the case we consider next.
For any fixed value of β, the point
p
=p0
+ β
(p1
-p0)
is a distance r from the x-axis if and only if
[y0 +
β(y1
-y0)
]2 +
[z0 +
β(z1-
z0)
]2 =
r2.
We can rewrite this expression as a quadratic in β.
[(y1
-y0
)2 +
(z1-
z0
)2]
β2 +
2[y0
(y1
-y0
)+
z0
(z1-
z0)]
β
+
y02+
z02-
r2=0.
This quadratic has 0, 1, or 2 real roots. We analyze each of
the cases.
- If the quadratic has no real roots, then
no point on L is r units from the x-axis. In this case
we simply report that no edge collision occurs; i.e. we return α=1.
-
If the quadratic has one real root, β=s, then exactly
one point on L, namely
p
=p0
+ s
(p1
-p0),
is a distance r from the x-axis. This also means
that no point on L is closer than r from the x-axis.
Thus an edge collision can only occur when the ball's center is at
p0
+ s
(p1
-p0). This point is
on the ball's path if 0 ≤ s ≤ 1. The point the ball touches on
the x-axis is on the edge if
0 ≤ x0 + s
(x1-
x0)
≤ x. If both of these conditions hold, then
we need to check that the ball is moving toward the forward face of
of the incident triangle.
To do this we check if the dot product of the front-facing normal
to the triangle and the vector from
p0 to
p1 is less than
or equal to 0. If this test succeed, we return α=β.
We also return normal of the triangle.
-
Finally we consider the case where the quadratic has two real root,
s0 and
s1. We'll assume that
s0 <
s1.
We claim that the only root of interest is
s0 and the test for collision is
the same as for s in the previous case.
Proof of claim: The roots s0 and
s1 correspond to points
S0 and
S0
that define the region of L
that is a distance r or less from the x axis.
We consider three cases that depend on the relationship of
p0 to
S0 and
S1.
-
If p0 occurs before
S0
(as β increases from negative infinity), then the first
point on the ball's path that is r units from the x-axis is
S0. So it suffice to check
that point.
-
If p0
occurs after S0 but before
S1 then
s0<0 and our test reports that
no collision occurs. This is exactly the right answer since, in
the case we are considering, the ball
at
p0
is intersecting the x-axis. But we know the ball does not intersect
the edge at its initial position. Therefore, if the ball does
collide with edge while travelling its path, the collision must
occur with an endpoint of the edge. But that is a vertex collision,
which is detected
by the vertex collision algorithm.
-
Finally, if
p0 occurs
after S1,
then
s0 <
s1<0. Once again
our test reports that
no collision occurs. And again this is the right answer since
no point on the path
is within r of the x-axis so no edge collision
occurs.
Generalized edge collision detection
To take advantage of standardized edge collision algorithm,
we can transform an arbitrary edge and the ball's path
so that the edge is in standard orientation. We check for
a collision in this standardized frame of reference up to the point of checking
the triangle normal. At this point we've found an α representing
a point on the ball's path in the standardized frame where a collision
occurs. But this α
also corresponds to a point on the path in the real world
where a collision occurs. As the last step we perform the dot product
test in the real
world to determine if the collision is on the front face of an
incident triangle.
Separate notes describe the algorithm for
standardizing an edge
and for transforming points (the ball's starting and ending
position) into the standardized frame. To speed our algorithm, we
can precompute the standard orientation of each edge.
Last updated September 2004.