Rainbow Monster Truck
Jessica Fisher
Brie Finger
Rainbow Monster Truck Code
Nomad 200 Markov Localization
Nomad 200 Monte Carlo Localization
Videos of the Rainbow Monster Truck
- Video 1 -- successful run
- Video 2 -- RMT gets stuck in a corner
- Video 3 -- RMT extinguishes Brie and some wax
Introduction
One of the newest areas of robotics is that of search-and-rescue.
Robots are capable of entering areas that humans may not be able to
reach or survive in (e.g. a collapsed mine full of toxic sludge). One
of the main purposes of these robots is to bring supplies to people
who may be trapped. Our project is a basic simulation of this aspect
of search-and-rescue.
 The Rainbow Monster Truck is a
robot based on the Handyboard system (Fig. 1) and built
with Legos. The primary objective of Rainbow Monster Truck is to
locate candles via light
sensor. Heat sensors would have allowed us to simulate seeking out
warm bodies, but none were available for our use. Using the light
sensors allows us to locate candles without
knowing their location in advance, and with no map of the environment.
In order to
simulate actual search-and-rescue, we have designed a robot to travel
over rough terrain to get to the candles.
The Rainbow Monster Truck is a
robot based on the Handyboard system (Fig. 1) and built
with Legos. The primary objective of Rainbow Monster Truck is to
locate candles via light
sensor. Heat sensors would have allowed us to simulate seeking out
warm bodies, but none were available for our use. Using the light
sensors allows us to locate candles without
knowing their location in advance, and with no map of the environment.
In order to
simulate actual search-and-rescue, we have designed a robot to travel
over rough terrain to get to the candles.
Background
Robots are more often used for urban search and rescue (USAR) than for
wilderness search and rescue. The reason for this is that in urban
environments (e.g. a collapsed building) there are not enough rescuers
to rescue all the trapped people, and the environment is very risky
for human rescuers[1]. Robots have the ability
to get through small spaces and enter hazardous environments. Such
robots are sometimes used to simply locate trapped people, but also
may be used to bring food and medical supplies to such individuals.
One of the first large-scale attempts to use USAR robots was at the
World Trade Center in September, 2001, where they were credited with
finding the remains of several victims[2].
Similar robots are used to map areas that humans cannot enter[3]. These robots often use localization techniques
such as Monte Carlo localization[4] or, if they
do not have a map, Expectation Maximization(EM)[5]. However, the Rainbow Monster Truck's
task does not involve reporting the location of the candles it
locates, but simply reaching them (to simulate delivering supplies).
For our purposes it is sufficient to extinguish the candles to show
that they have been visited. We use a fan to extinguish the candles,
for simplicity.
Approach

Our basic approach to the body of our rough terrain robot involves a
joint in between the front and back halves of the robot (Fig. 2). This
flexibility allows for rolling over objects and climbing over peaks.
The front half of the robot includes the unpowered wheels for
steering. These wheels can be rotated by a motor, but do not have a
motor for locomotion. The wheels used are the largest size Lego
wheels available.
The back half of the robot includes two sets of powered wheels with
four motors, one for each wheel axle. The middle axles have two
wheels each, and each rear axle has three wheels to
provide greater traction on rough surfaces. Also, the back half has a
platform to hold the Handyboard in place.
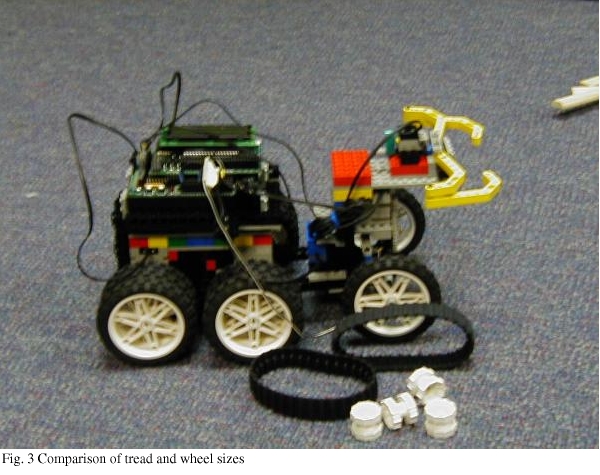
Initially, we had envisioned a robot with treads, on the assumption
that they would be more robust than normal wheels (Fig. 3). However, the
treads and wheels provided in the Lego Mindstorms kit proved to be too
small and not powerful enough to overcome even minor obstacles.
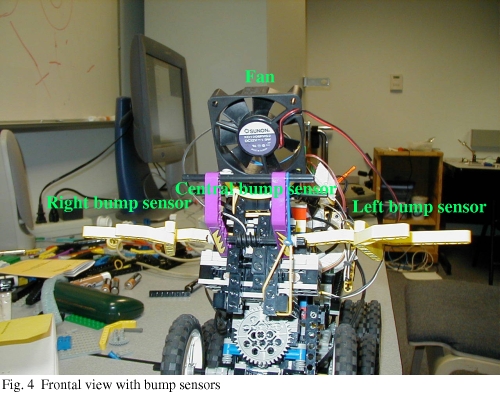
The front of the robot also includes three bump sensors (Fig. 4) set at a relatively
high level (so as to avoid sensing obstacles that the robot might
climb over). In this way, the robot can detect obstacles on the left,
on the right, or directly in front of it. When the left bump sensor
is activated, the robot backs up and turns slightly to the right,
proceeds forward for a short time, then straightens out its wheels (by
rotating them in the opposite direction for the same amount of time).
The robot behaves similarly when the right bump sensor is activated,
turning to the left. When the central bump sensor is activated, the
robot backs up farther and turns dramatically to the right.
For use in the extinguishing task, a fan is mounted on top of the
front of the robot.
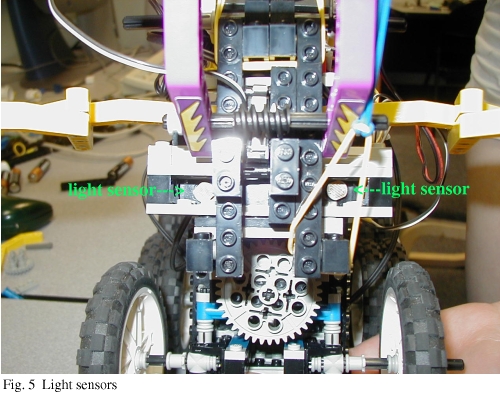
Our approach to the task involves allowing the robot to wander through
the environment, looking for light sources (using two light sensors).
The light sensors are attached to the front of the robot in a small
encasement to shield them from large amounts of ambient light (Fig. 5). One of
the sensors is slightly to the left of the center, and the other is
slightly to the right, both just below the bump sensors.
In this way, the robot can detect if it is to one side of the candle,
allowing it to center itself in order to extinguish the candle.
When the robot is initialized, it takes readings of the ambient light
and stores them as base readings. It then waits for measurements
indicating a light whose brightness is above a set threshold beyond the base
readings. In this way, minor variations in the ambient light will not
trigger the extinguishing routine. The thresholds are different for
the left and right sensors depending on their sensitivity.
If only one light sensor is triggered, the robot will back up and turn
in that direction. If both are triggered, the robot will stop and
run its fan for a set length of time. If the candle has not been
extinguished (determined by the new readings from the light sensors),
the robot will scoot forward and try again, as long as both sensors
are still detecting the candle. The robot "succeeds" when both
sensors are no longer detecting a candle, and it backs up to begin
searching for more candles. It "fails" if only one sensor is
detecting the candle, and it backs up and begins recentering.
Progress
In the first phase of our project, our goal was to make the Rainbow
Monster Truck traverse rough terrain without getting damaged. We considered
implementing wall-following as a basic navigation technique, but the
task of building the robot turned out to be much more time-consuming
and difficult than expected, so we decided not to add a sonar sensor
for wall-following. Also, the environment may not have walls, so that
may not be the most appropriate technique. Navigation is implemented
as described above; essentially, the robot goes forward and bounces
off walls until it senses a candle. One side effect of the three
different bump sensors is that the robot tends to get stuck in
corners. In general, the simple-minded navigation works fairly well
for its purpose.
The Rainbow Monster Truck (Fig. 6) (so named for its lovely
multicolored Legos and it's excessive size)
is capable of climbing over low obstacles (up to approximately half an
inch). It is also capable of locating and extinguishing a candle,
though it does not always do this successfully.
We attempted to use a rotation sensor to assist in keeping the wheels
pointing straight ahead. However, this sensor proved unreliable and
insane; for instance, if the robot got stuck on a wall, the wheels
would rotate uncontrollably back and forth based on the erratic sensor
readings. Furthermore, the recentering routine somehow managed to
take over the robot such that no other routines were ever called (even
though there were no infinite loops in the program). As a result, we
removed all references to the rotation sensor and fell back on our
original plan of assuming the wheels are straight if we have not
rotated them. If it is the case that the robot is turning, we run the
rotation motor for a set time period to accomplish the turn.
Afterwards, we assume that running the motor in reverse for the same
time period will restore the initial angle of the wheels (hopefully
straight). While this accumulates error, our test courses were short
enough that the robot still managed to find and extinguish the candle.
The Rainbow Monster Truck in its final state is capable of traversing
a simple obstacle course and extinguishing a candle in many
configurations, as originally intended.

Perspective
Designing a robot to traverse rough terrain turned out to be much
more difficult than we originally anticipated. Our failed first
attempt at a design proved to be very time consuming.
The system does not perform very well at climbing over
obstacles. The main problem is that it cannot climb over obstacles
more than half an inch tall, and when the battery is run down, it
cannot even accomplish that. The reason it cannot get over these
obstacles varies between the wheels not having enough power, and not
enough powered wheels touching the ground to provide traction.
A solution we might consider for future enhancement is
gearing down the
wheels to give them more power.
Also, due to the segmented design and the length of the Rainbow Monster Truck,
it has a very large turning radius. This makes navigation of tight
spaces very difficult. However, the robot must be large enough to
hold the Handyboard, so we are very limited in this respect.
In our testing, we discovered that adding more wheels to each axle
to increase traction improved the robot's performance at climbing over
obstacles, although more wheels require more power. Another way to
improve the performance might be to remove
part of the body of the back half so that it is lighter. However, the
Handyboard itself is fairly heavy and must sit on the robot at some
location, so it is not possible to make the robot very light.
The front portion of the robot was initially light enough to roll
over many obstacles, but the addition of the light sensors and bump
sensors required so many stabilizing and clamping Legos that it became
very heavy. It is not possible to remove any of these stabilizers,
because without them the bump sensors may fall off at any collision.
This would not have been an issue had the robot not been made out of
Legos; if the pieces of the robot could be more firmly attached
(through welding or some other powerful technique), little
reinforcement would be necessary. Ultimately, a more efficient
overall design incorporating all the necessary sensors would have been ideal.
One major problem we encountered had to do with the unreliability of
the light sensors. If the light sensors obtained an initial reading
of a neutral-colored environment, any light-colored object would
be beyond the brightness threshold. As a result, the robot often
attempted to extinguish light-colored obstacles, or light-colored
researchers. To work around this, we were able to initialize the
robot with a white paper in front of it. However, when initialized
with the white paper, the robot failed to sense the candle. This
would not have been an issue had we used a heat sensor rather than a
light sensor.
Also, the robot is not very proficient at overcoming obstacles from a
standstill. It requires some room to move forward to get enough
momentum to roll over obstacles, so we were unable to have it find a
candle in a room full of obstacles. This is another problem that may
be solved by more powerful motors or more efficient design.
Overall, although there were many problems with the Rainbow Monster
Truck, it is capable of accomplishing the basic tasks we set for it.
An area of further research might be comparing the strengths of
various motors. The Lego motors that we are using are not designed to
power particularly large or robust robots. It might be the case that
with stronger motors the robot would be able to climb over larger
obstacles. Another area of research would be investigating the best
body design for traversing rough terrain, assuming that the robot must
use wheels. It would also be interesting to examine the differences
between sensing light sources and pale-colored objects in order to
distinguish between the two. Finally, in keeping with the
search-and-rescue concept, modifying the robot to use heat sensors
rather than light sensors would be gratifying.
References
1. Murphy, Robin et al. USAR Frequently
Asked Questions. Available at http://www.csee.usf.edu/robotics/crasar/faq.html
2. Davids, Angela. Urban Search and Rescue
Robots: From Tragedy to Technology. IEEE Intelligent Systems.
March, 2002: 81-83.
3. Thrun, Sebastion. The Groundhog
Experiment. Available at http://www-2.cs.cmu.edu/~thrun/3D/mines/groundhog/index.html
4. Dellaert, F. et al. Monte Carlo
Localization for Mobile Robots. IEEE International Conference on
Robotics and Automation. May, 1999.
5. Seo, Yongduek and Ki Sang Hong. Structure
and Motion Estimation with Expectation Maximization and Extended
Kalman Smoother for Continuous Image Sequences. IEEE Conference on
Computer Vision and Pattern Recognition, 2001.