Team AIBO
Brian Bentow - Yu-min Kim - Joshua Lewis
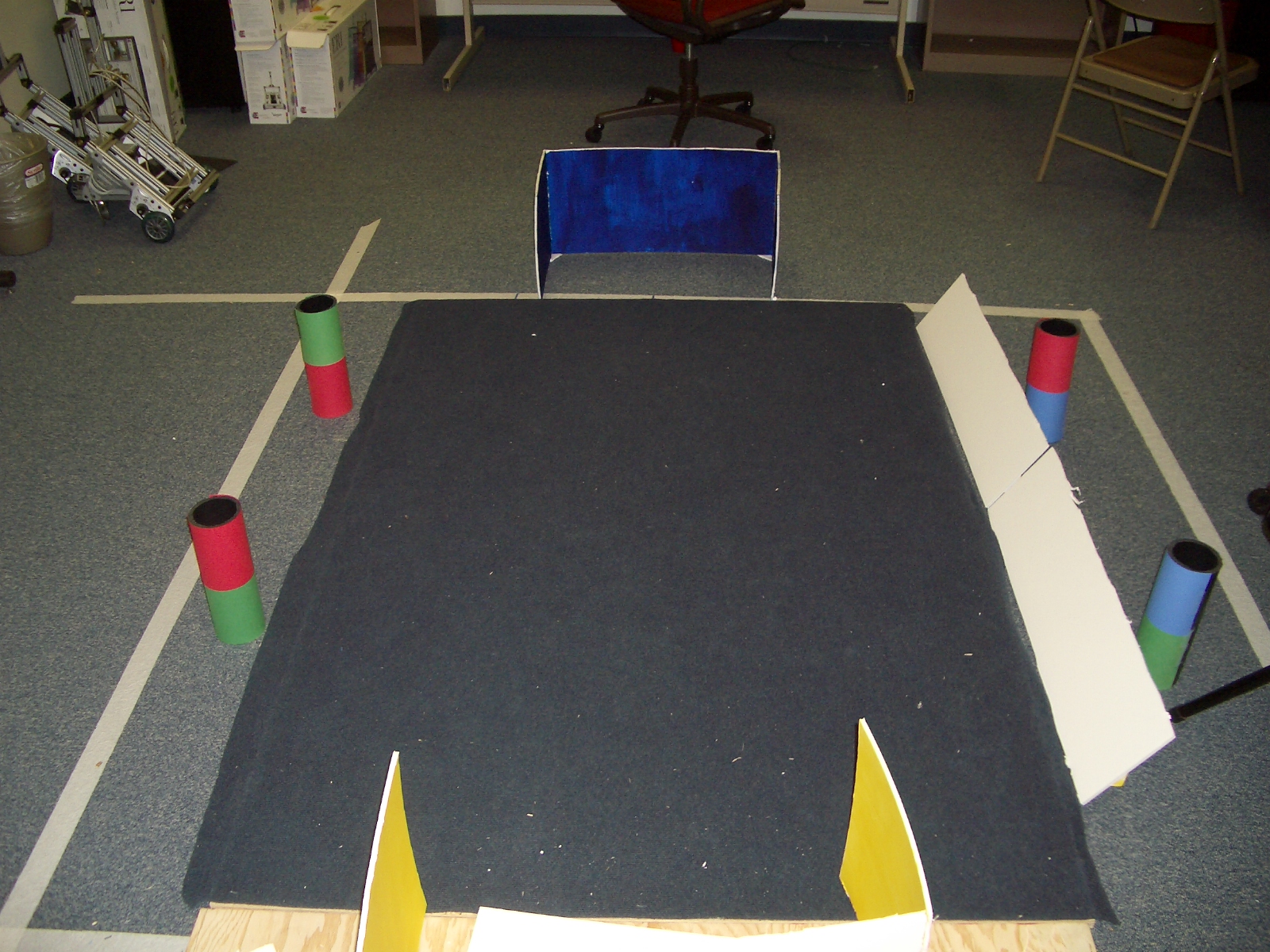
The AIBO pen is currently under construction. When complete, this
6 foot by 4 foot piece of plywood with outdoor carpeting attached to it will be both our AIBO soccer
field and our lab arena, where we test the results of our projects.
Process and Challenges
Design
Initially, we intended to create an AIBO soccer arena from the 2005 robocup soccer field specifications. Unfortunately, this field is designed to be 6 m x 4 m or (19ft x 13ft). Due to space imposed limitations and prohibitive costs of building such a large arena, we decided to build a 6 ft x 4 ft arena. Unfortunately, we cannot simply scale everything in the arena down by a constant factor. For instance, one needs to make sure that the goals are large enough for the aibo to inhabit. We decided to go with 600 mm goals as opposed to the 800 mm goals described in the specs.
Goals
Our goals are made from posterboard purchased at Michael's. We painted one goal blue and the other yellow per the robocub soccer specs. The goals are 2 ft wide and 1 ft deep as opposed to almost 80 cm wide and 30 cm deep as described in the specs.
Landmarks
Our landmarks are 10 inches tall and made from black, 3' in diameter PVC purchased at Lowes. We cut a 5' PVC pipe into 6 10' cylinders using a hacksaw. Then, we create 6 permutations of taking 2 colors from the set (red, green, blue) and made 6 distinct landmarks. Note that the spec describes using on 4 landmarks but we felt that having additional landmarks would be helpful for localization. Also, we can always use fewer landmarks if it seems prudent to do so. Our colors also do not match the specs described landmark colors.
Walls
Our walls are made of 1/4 " white posterboard purchased from Michael's and have a slope at around 60 degress and are around 6 inches high.
Soccer Field lines
We plan to use cloth paper tape for the field lines but are still not sure how we will deal with the circular area in the middle.
Field Material
We tried to choose a surface that fit two criteria, some softness (so that it wouldn't contribute to joint wear on the AIBO), and no non-local effects (for example, stepping next to the ball, deforming the surface and causing the ball to roll, messing with our predictions about where the ball should be). We noticed that the deformable surface we initially used for the AIBO caused the dog to lose the ball when using Sony's built in programming.
Accomplishments
- Purchased plywood, carpet and pipe from Loews.
- Cut pipes and attached carpet to plywood.
- Constructed six marker pipes.
- Fit carpet to plywood.
- Added goals.
To Do
{kind=link}
{kind=link}
{kind=link}
{kind=link}