
Jonathan Beall - Robin Schriebman - Whitney Buchanan
Our robot is based around the Barbie Jeep Powerwheels toy car. The brains of the robot will be provided by one of our Apple laptops.
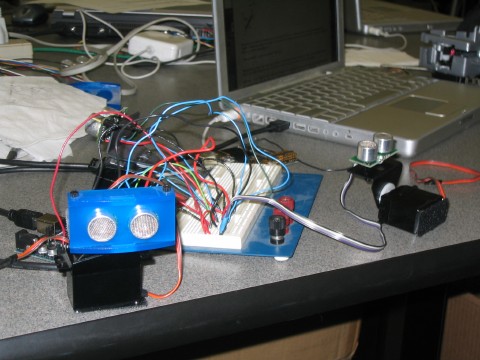
We have explored the following other components for our robot:
The Arduino and Brainstem controller boards both provide a USB interface and a programmable microchip to allow them to interface a computer to various sensors and actuators. We have begun our development using the Arduino board to control servos and sonar.
Our sensors currently include an iSight camera and the SRF04 sonars.
Pictures can be taken with the iSight camera can be accessed from the
commandline, but we
intend to use the
pySight library, a wrapper using
PyObjC to expose the
Quicktime
SequenceGrabber interface in Python, in order to do processing of
the image stream in our programs. We have also examined the sonar
modules in the robotics lab and written a program for the Arduino to
read distances from them.
Additional sensors we may employ include IR range-finders, the built in accelerometers in the MacBookPro, and a GPS reciever.
In order to drive our robot around we will need to control both its
steering and its velocity. To control steering, we have purchased a
bicycle chain and gears which we will use to connect a powerful
HS-805BB servo
(ordered and on its way) to the steering wheel. Having worked out how
to control servos with the Arduino board, integrating this into our
robot's control systems should not be too difficult. To control the
robot's velocity we are following two approaches. We will replace the
gas pedal of the robot with a
HB-25 motor controller, which should give us full forward and
reverse control. Although the motor controller will likely render it
obsolite, we also have a lego-servo-pink-zip-tie system in place
which allows the computer to control the jeep's shifter.
