The Predator's Purpose
2020
Overview
You notice a small bug crawling on your bathroom floor. As far as you can tell, it pays no attention to you, even when you approach and decide to remove it from your home. A smarter, larger animal would become alarmed at your proximity, but the bug doesn't realize the danger posed by your sudden attention. If it sensed your intentions it would likely flee. As an engineer, you ask yourself how you would create an algorithm for this sort of "danger detection."
In this study, we perform a series of tests in a simulated environment inhabited by virtual agents to measure the survival advantages gained by agents who are able to perceive intention. We seed the simulated world with small, fast agents searching for food and more powerful agents seeking to eat the smaller agents. We measure survival rates when large agent (predator) intention is perceptible to the smaller agents (prey), above and beyond merely sensing their general proximity, allowing them to sneak around agents and flee when in danger. We compare this to the survival rates of agents who cannot perceive intention, but can still sense proximity. Lastly, we measure survival rates when neither proximity nor intention is perceptible.
Simulation Details
The simulation represents a prey-predator situation where predators aim to eat prey and prey aim to eat food and avoid predators. We designed algorithms by which the agents choose their direction and speed, and let their interactions play out and reveal statistically significant trends. In this project we compare prey with four levels of awareness:
- Unaware: Prey are only aware of the location of food and are oblivious to predators.
- Proximity: Prey are also aware of nearby predators and can try to avoid them.
- Proximity + Attention: Prey are also aware of which specific predators are targeting them and can prioritize avoiding them over others.
- Cautious: Simulates the behavior of the previous tier, except they think that random predators are targeting them, which may or may not actually be the case. This level is to show that any benefit of the Proximity + Attention tier is due to the knowledge and not our designed behavior.
We compare these types of prey over different scenarios by varying specific agent properties, such as how far agents can see (sight distance), their field of view (sight angle), how fast predators are in relation to prey (speed fraction), the number of prey per predator (prey-predator ratio), and how long a prey can go without eating food (maximum fasting interval).
The code for this project can be found here.
Results
Intention-Aware Prey Survive Longer in Most Scenarios
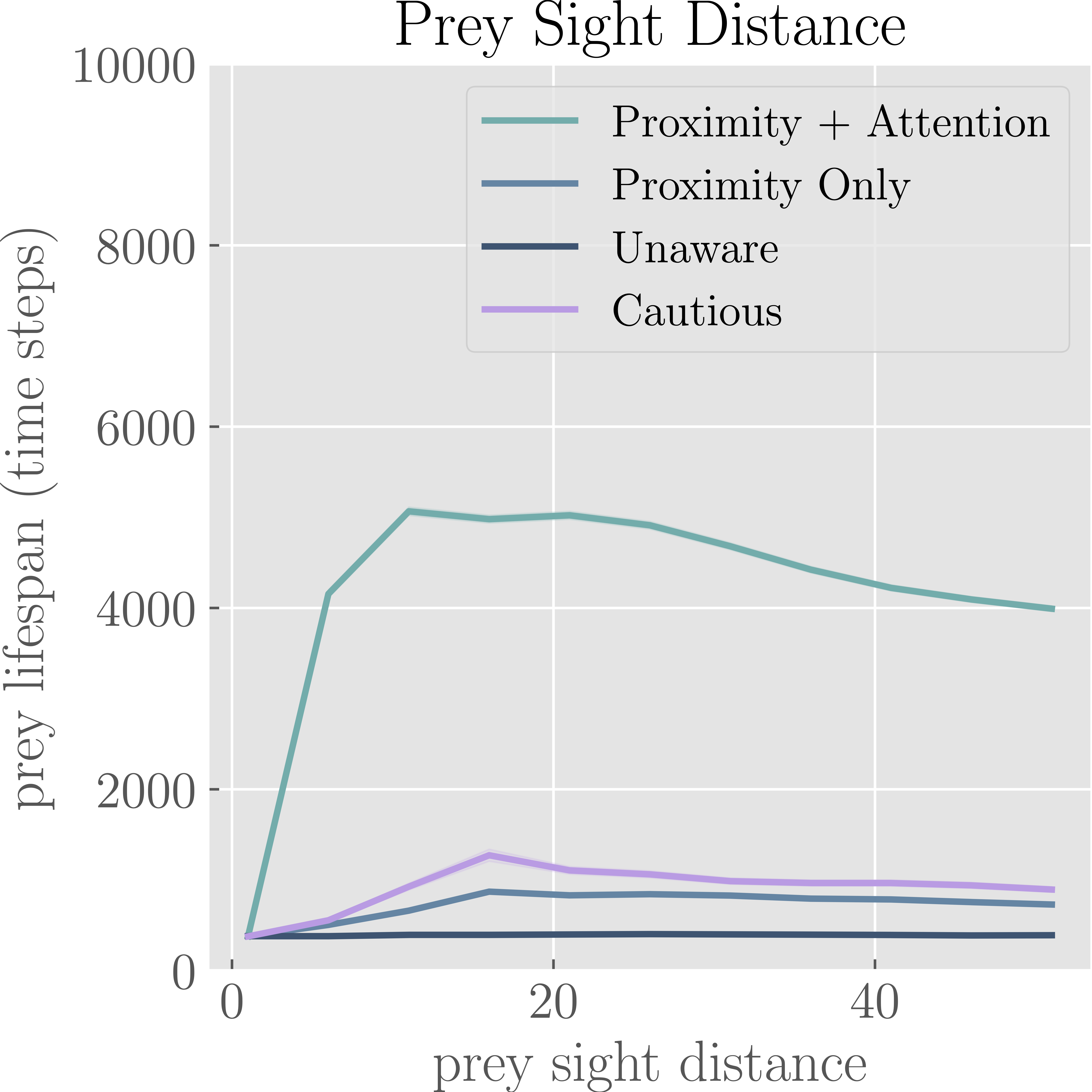
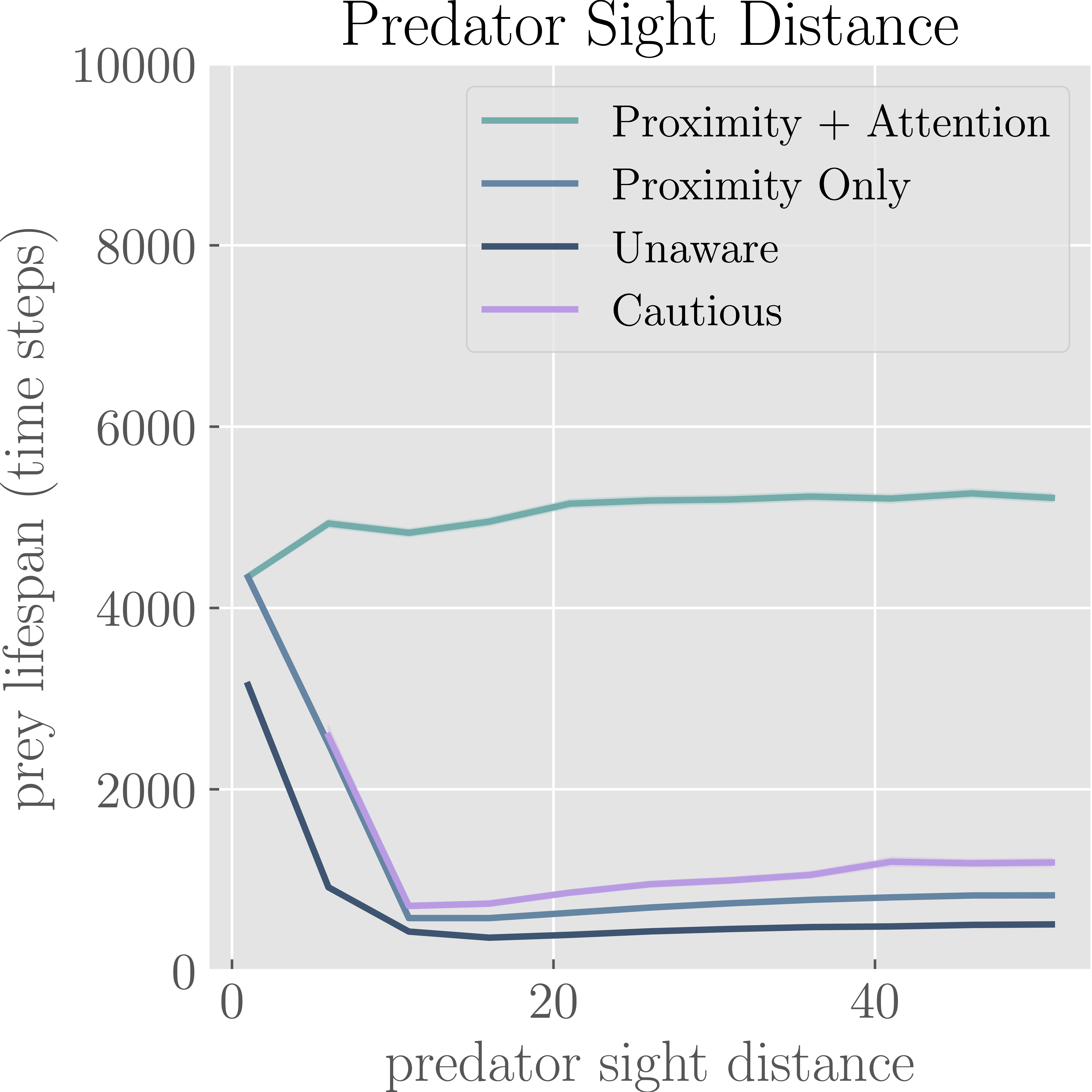
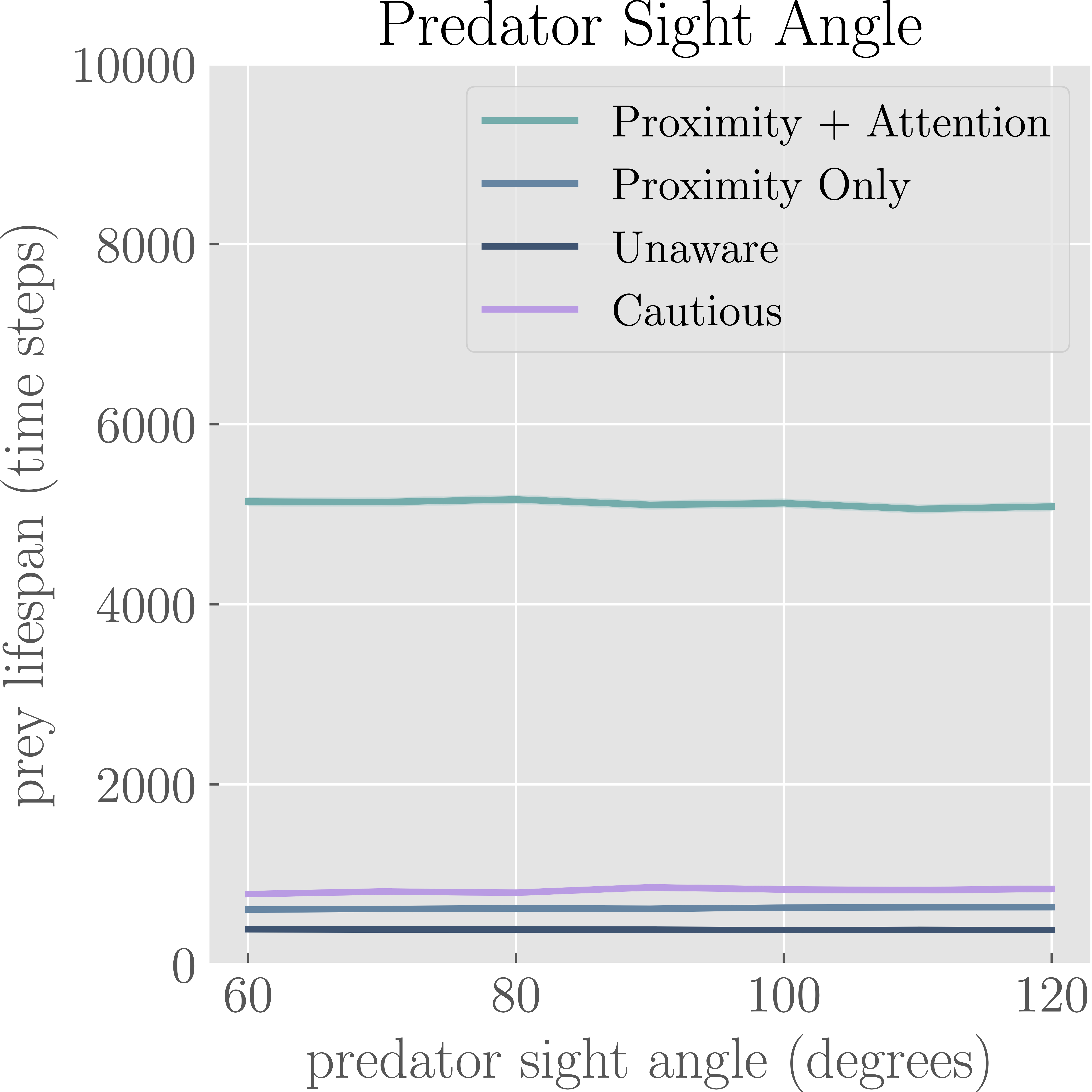
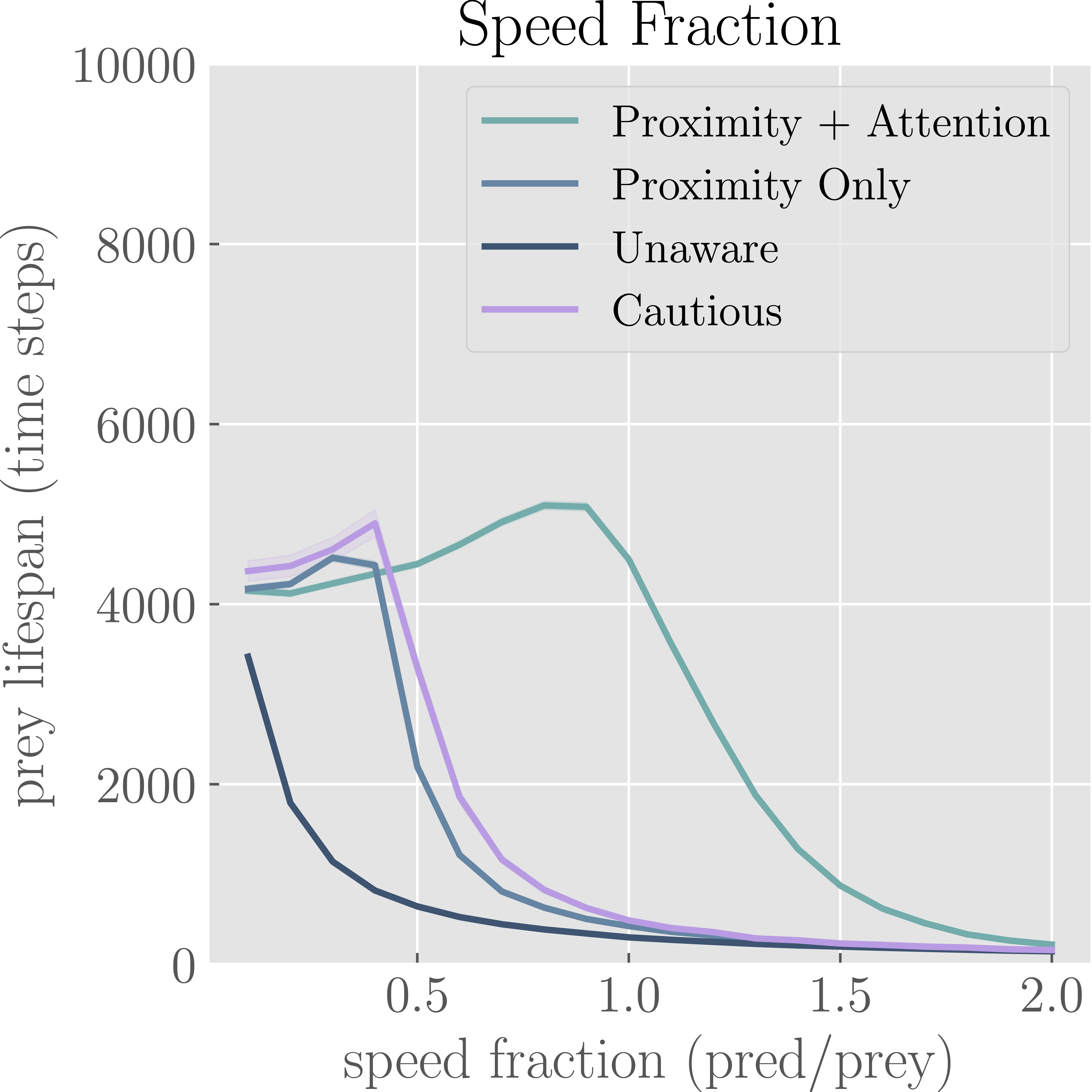
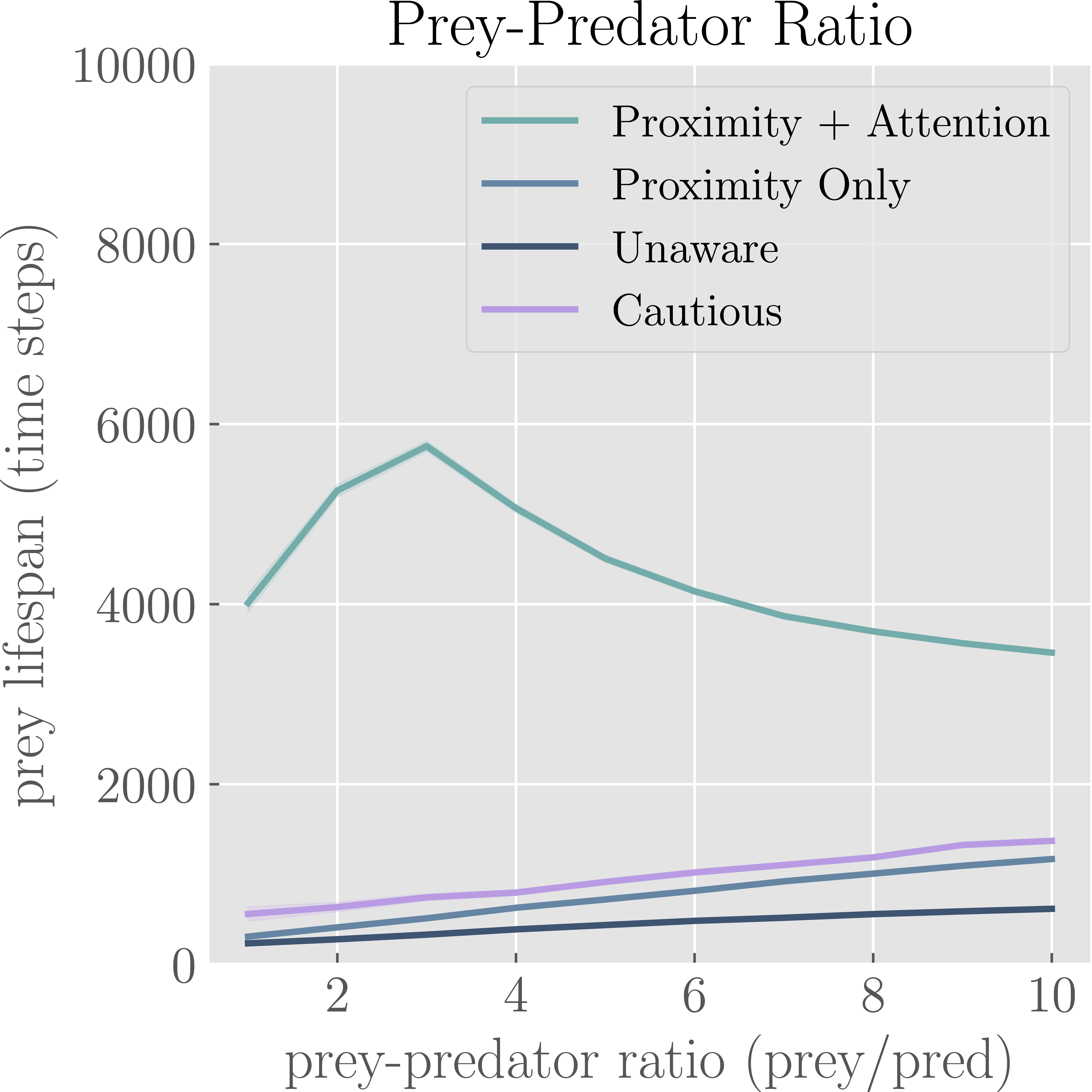
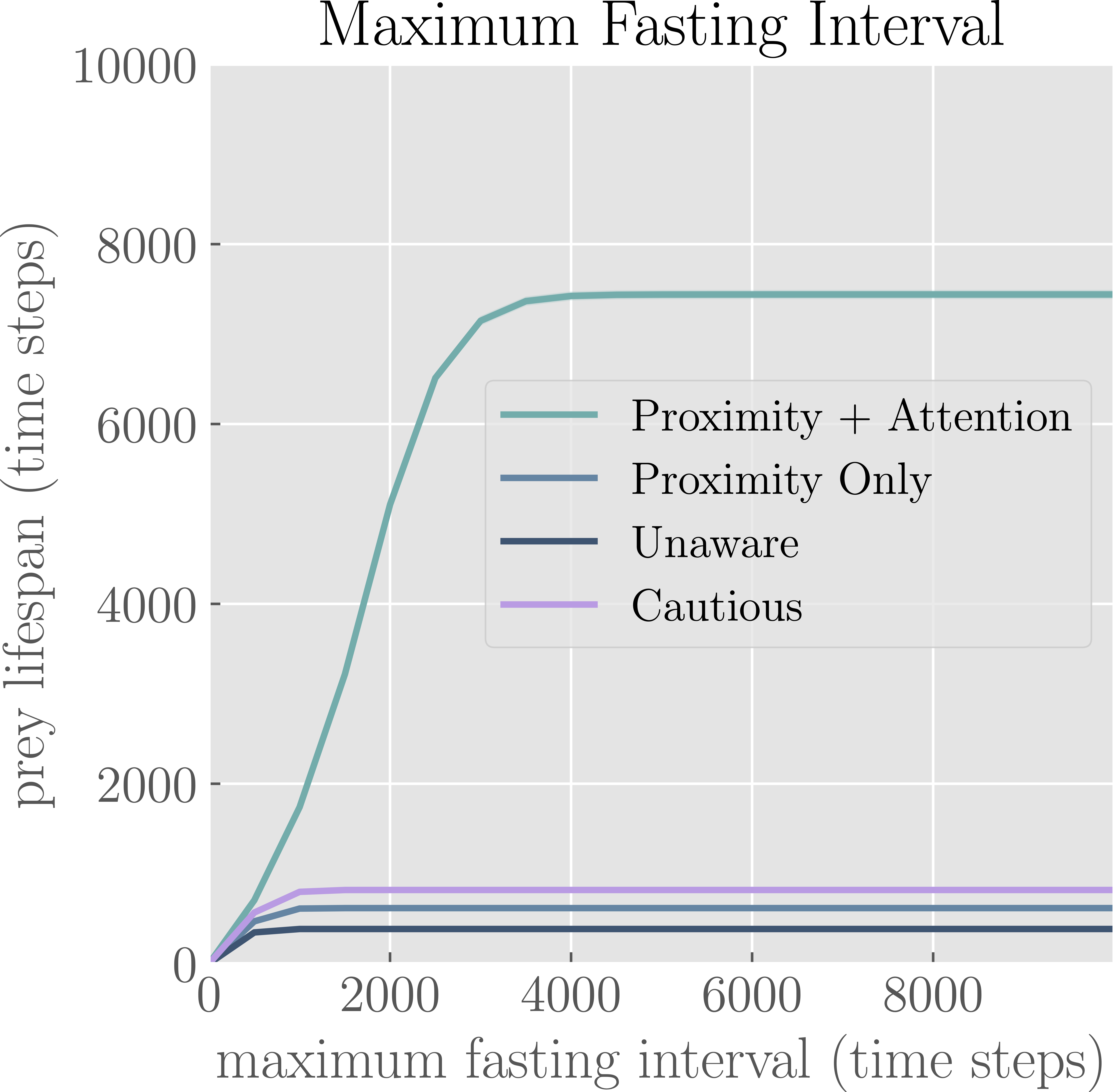
We see that under the vast majority of scenarios, the prey with proximity and attention awareness survive longer than the rest. Of particular interest, we note that there is a peak in the graph for prey sight distance, which indicates that too much knowledge can be detrimental. We believe that the extra information muddles their priorities and makes it difficult to decide on a direction. In the graph for the maximum fasting interval, we see that prey with proximity and attention awareness perform much better as the eating requirement is relaxed.
Intention-Aware Prey Starve More Frequently Than Other Prey
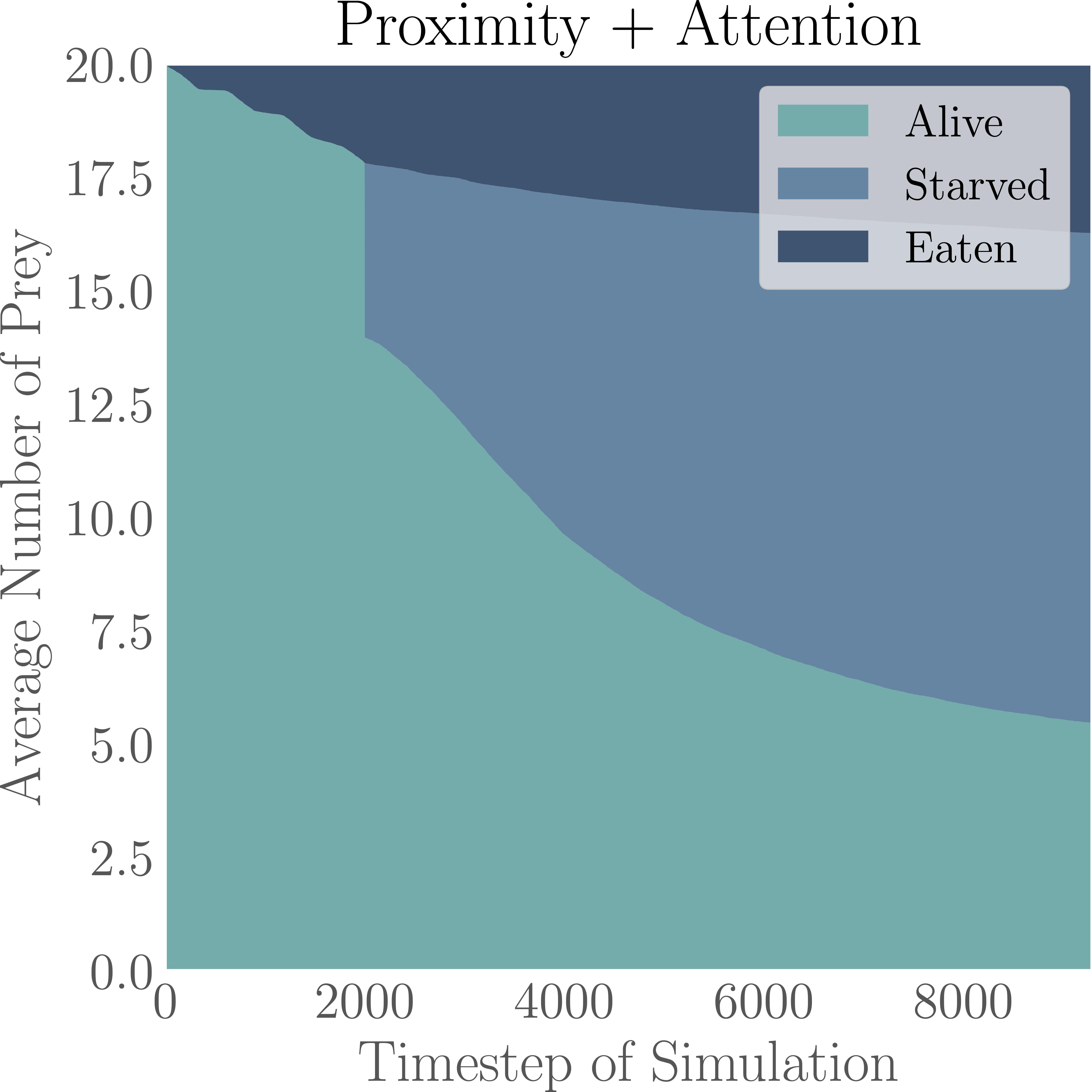
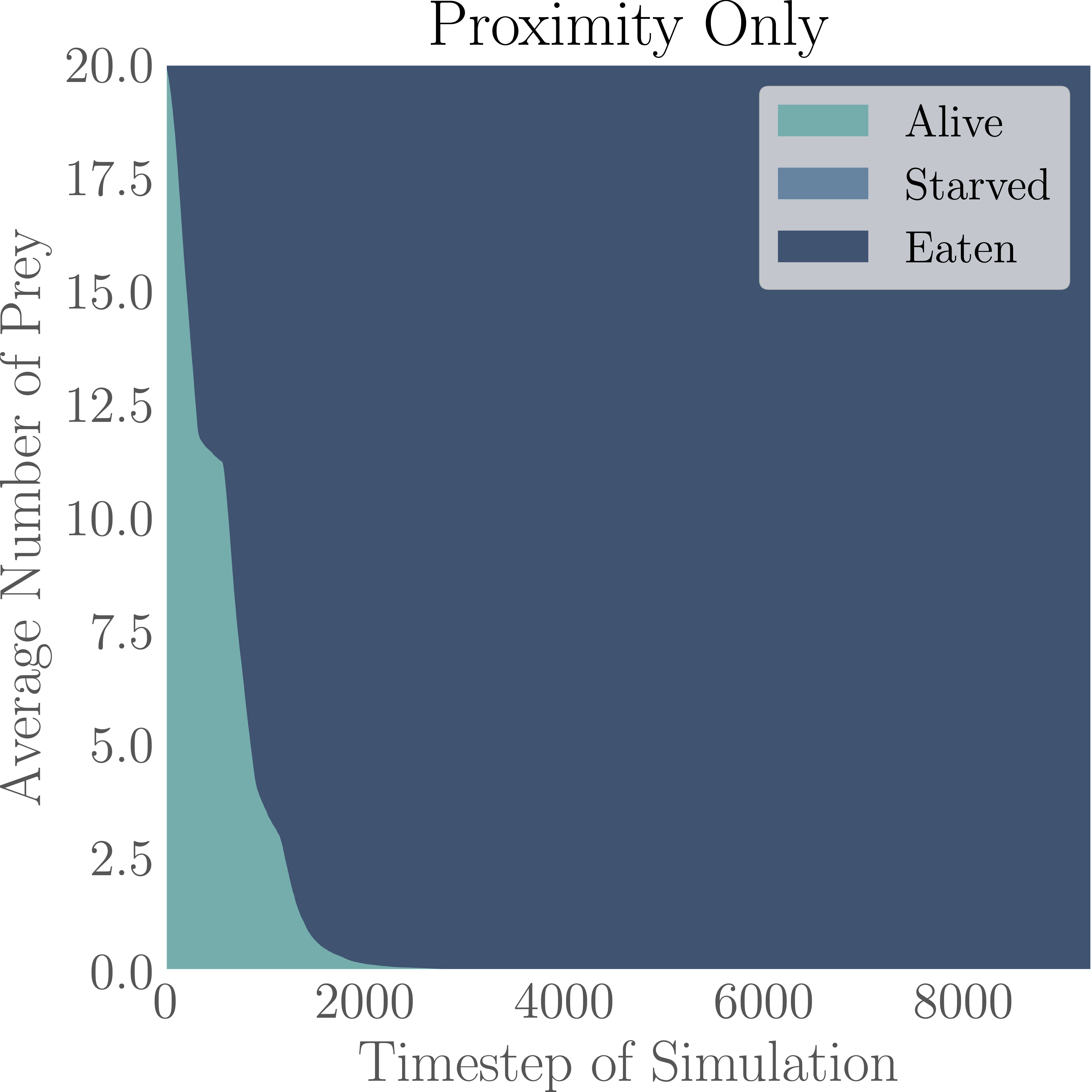
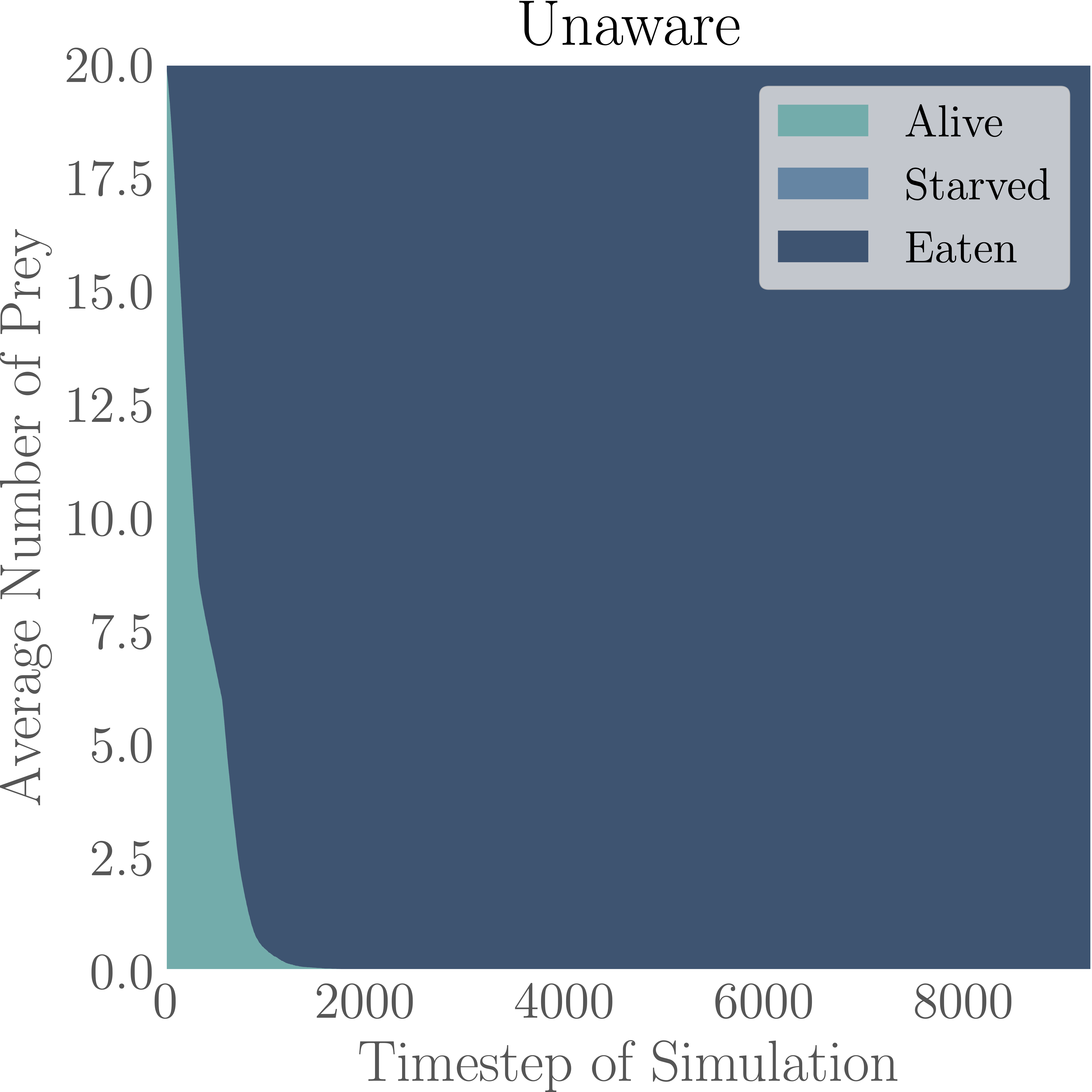
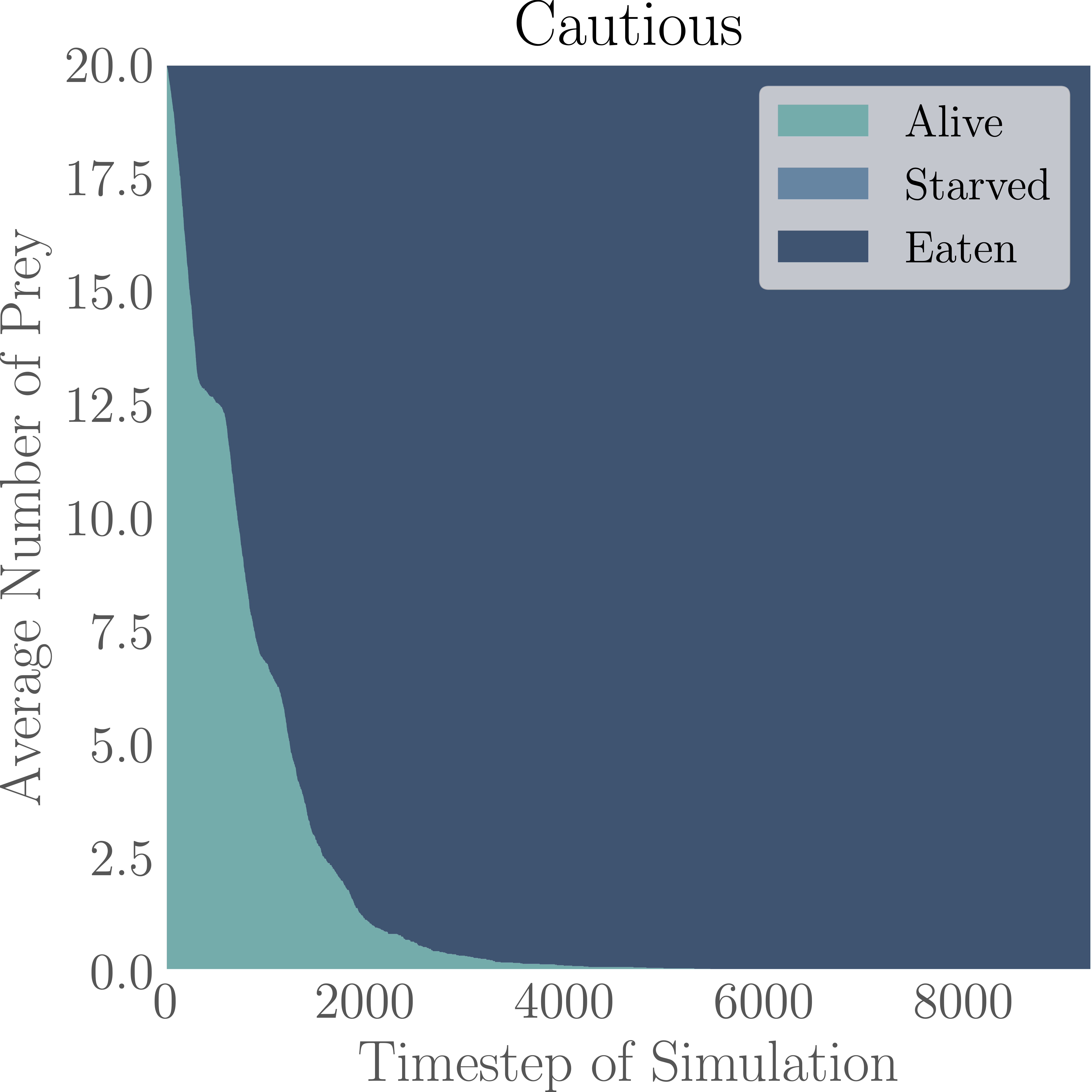
Here we see that a greater proportion of prey with proximity and attention awareness are alive at each time step than for prey of any other awareness tier. However, a greater proportion of them die from starvation as well. For the other tiers, the majority of prey are eaten before they have the chance to starve, but for the prey with proximity and attention awareness, they die much more from starvation than from being eaten by predators. We note that the cautious prey performs better than the proximity-only prey, but still significantly worse than the prey with proximity and attention awareness.
We conclude that prey with proximity and attention awareness have statistically significant survival advantages over the others, showing that intention perception does indeed confer a survival advantage. Although they starve more, this is typically more than made up for by the improved ability to avoid predators. Furthermore, we saw that there is a statistically significant difference between the survival rates of prey with proximity and attention awareness and cautious prey, indicating that the survival advantages are not due to our more cautious, designed behavior.
Additional Resources
Authors


Acknowledgements
Special thanks to Cindy Lay for aid in the preparation of this paper, and to Jerry Liang, Aditya Khant, Kyle Rong, and Tim Buchheim for assistance in experimental set-up. This research was supported in part by the National Science Foundation under Grant No. 1950885. Any opinions, findings, or conclusions are those of the authors alone, and do not necessarily reflect the views of the National Science Foundation.
Further Reading
- Maina-Kilaas A, Hom C, Ginta K, Montañez G, "The Predator's Purpose: Intention Perception in Simulated Agent Environments." 2021 IEEE Congress on Evolutionary Computation (CEC 2021), Online, June 28–July 1, 2021.
- Hom C, Maina-Kilaas A, Ginta K, Lay C, Montañez G, "The Gopher's Gambit: Survival Advantages of Artifact-Based Intention Perception." 13th International Conference on Agents and Artificial Intelligence (ICAART 2021), Online, Feb 4–6, 2021.
- D. Richards, M. J. Jacobson, J. Porte, C. Taylor, M. Taylor, A. Newstead, I. Kelaiah, and N. Hanna, "Evaluating the Models and Behaviour of 3D Intelligent Virtual Animals in a Predator-Prey Relationship," in Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems, vol. 1. Citeseer, 2012, pp. 79–86.
- E. L. Preisser, D. I. Bolnick, and M. E. Benard, "Scared to Death? The Effects of Intimidation and Consumption in Predator-Prey Interactions," Ecology, 2005, pp. 501–509.