|
 
CS 154 - Lab Projects
Marissa Anderson . Josh Kline . Matt Levinson
Matt Livianu . Chuck Matlack . Eric Wu
Project 3: BotBall
Intro
The culmination of our robotics efforts this term was building a HandyBoard/RCX platform for the collegiate BotBall tournament. The BotBall platform incorporates a number of challenging processing tasks, from engineering to visual tracking.
Final Report
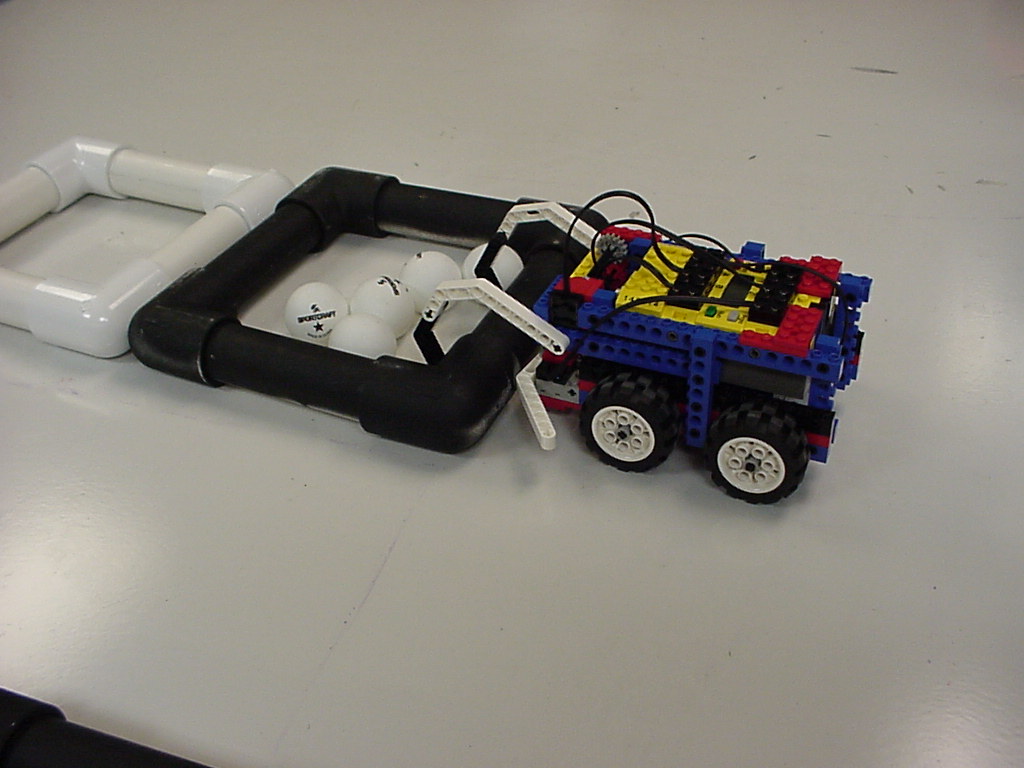
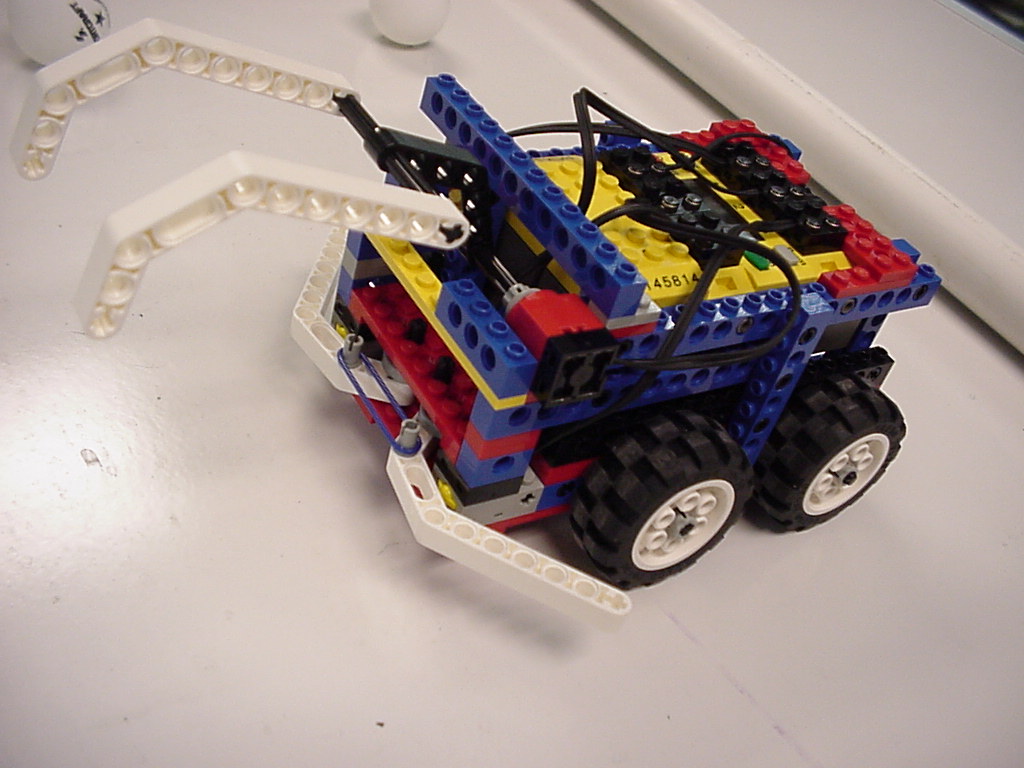
Since we are allowed to have two bots on the playing field, we continued construction with both an RCX and a Handyboard platform. The RCX is a fairly simple, durable construction: it drives forward until it runs into one of the ping-pong ball nests, then lowers the "claw" and drags the nest back to our side of the playing field. It uses a line-following algorithm and bump sensors to locate nests.
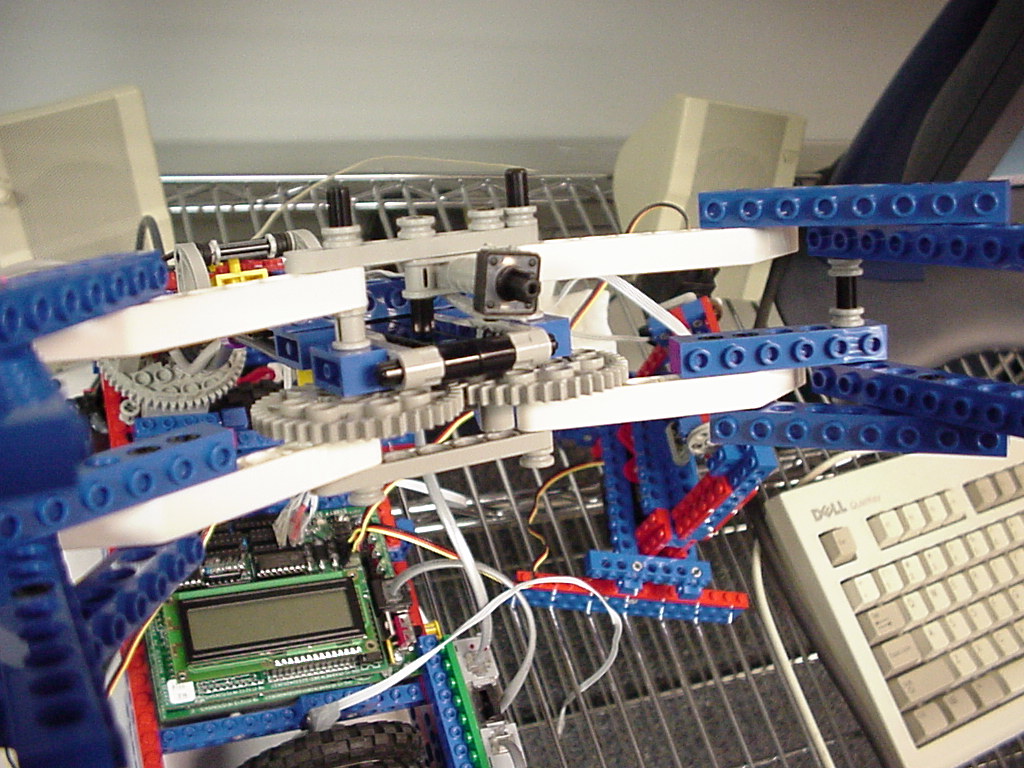
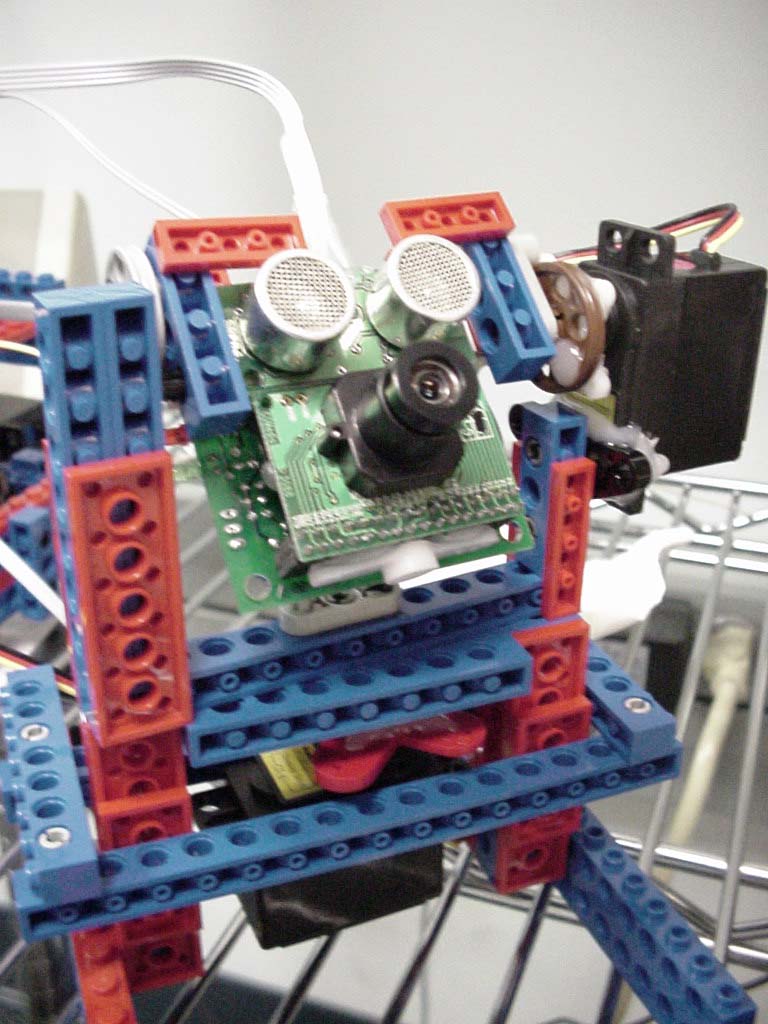
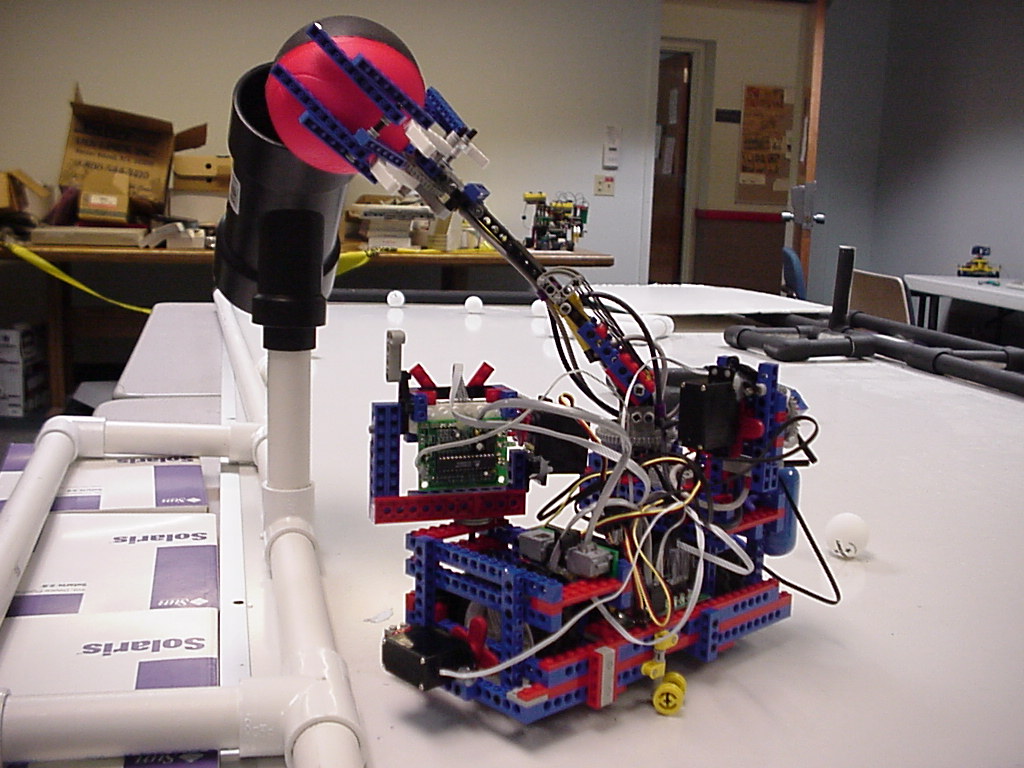
Finding foam balls is worth the most points, so we constructed a more complicated Handyboard platform to accomplish that task. The Handyboard has a pneumatic gripper arm that can grab a ball and reach up to place it in the basket. The camera can track by color, using PD control to pan and tilt to follow the color. Sonar might also help locate foam balls or obstacles. With encoders on the wheels, we can find out how far we've moved on the playing field.
We encountered difficulty with the hardware at several points. We were supplied with a limited number of legos, making it necessary to optimize the use of parts. One of the lego motors does not work consistently. The sensor wires are too short to extend the full length of the arm, and moving parts may yank the cables out.

|
RCX bot grabs a nest to pull it to our side.
|

|
The Handyboard bot with gripper arm for foam balls.
|

|
Camera/sonar mount for the HandyBoard, with pan and tilt mechanics!
|

|
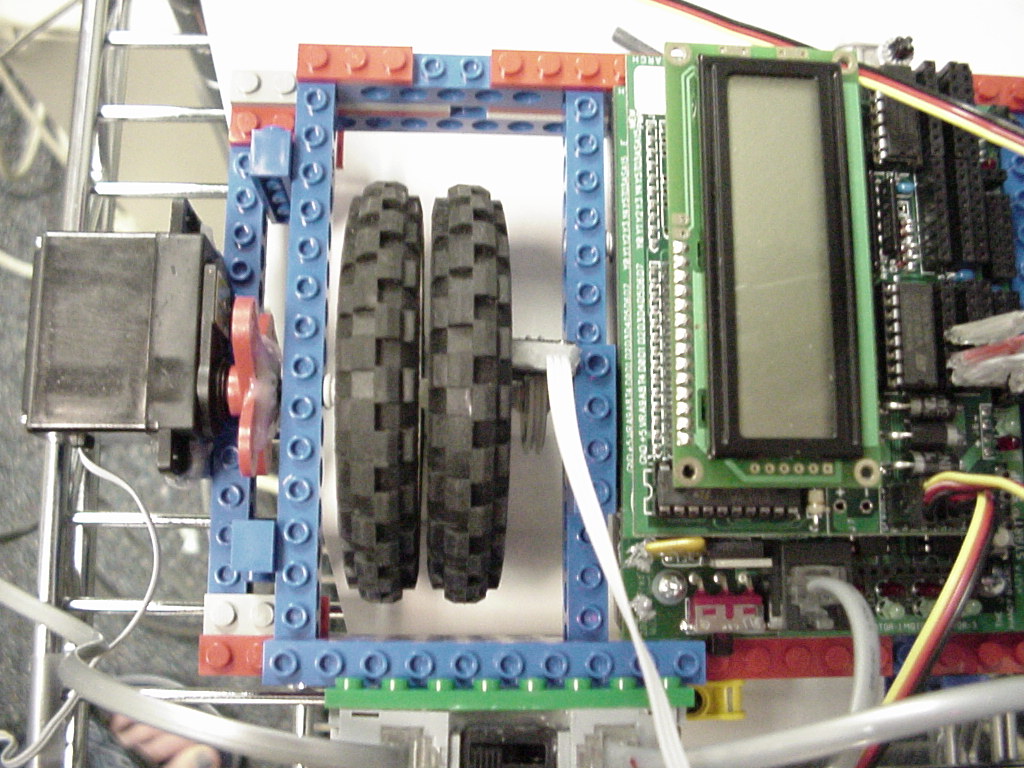
The motors are set on the outside of the wheels for better balance. Encoder sensors on the inside can give us a rough idea of how far the bot has traveled.
|

|
Closeup of the RCX.
|

|
The Handyboard wonder, in its final form.
|
|