|
   
CS 154 - Lab Projects
Marissa Anderson . Matt Livianu . Eric Wu
Week 2 - Feb 10, 2003
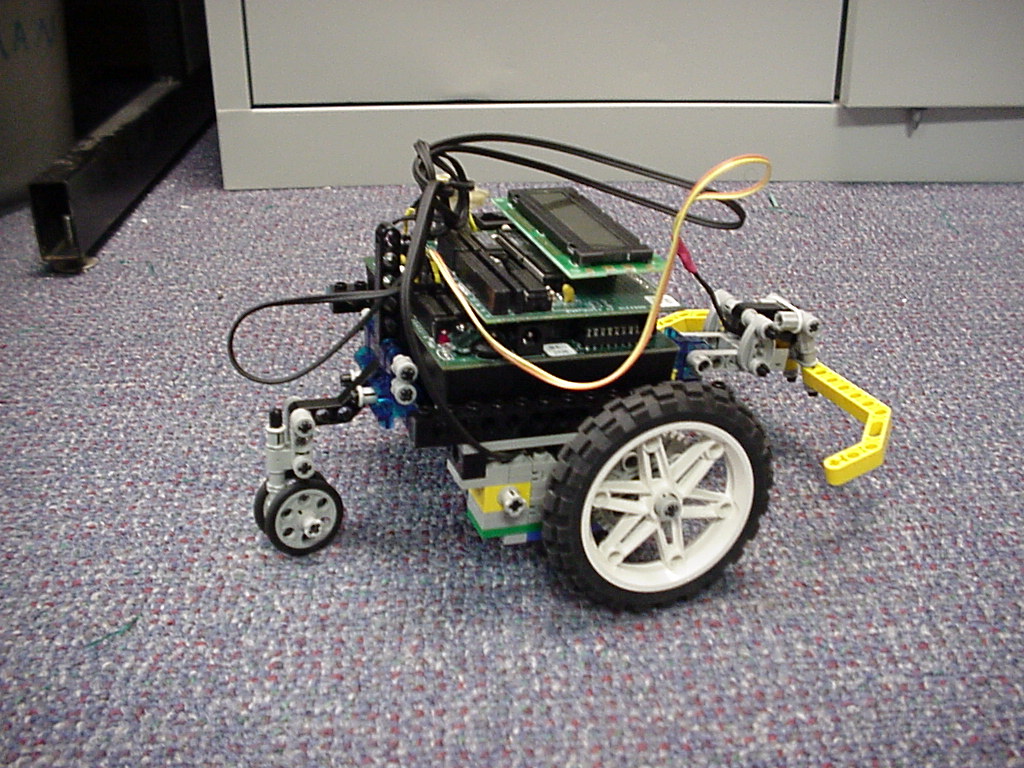
This week, we furthered the design of our robot and explored some different options for finding its place in the world. The wheel base is wider and more compact, with geared wheels. For this version, we are using a bump sensor to detect the presence of walls, and this seems to work well. The "arms" connected to the bump sensor can impact a wall head-on or from the sides. We are planning to use a light sensor and a fan to detect and extinguish a candle, but the current iteration of our code focuses on navigating.
We found that the front side caster wheel caused too many
problems to work out as a feasible design. The wheel caused the robot to
pull in unexpected directions. We decided to try a back side caster wheel.
Finding our chassis design to weak to withstand crashing into walls, and
not robust enough for our purpose, we started fresh with a new design. We
kept the single front bump sensor design(for now) and added an 8 to 1 gear
ratio on each of the two rear drive motors. We found that this gave the
flamebot much more control over small motion and ended the necessity for
at least 25 power to the motors to overcome static friction. The castor
wheel in the rear was redesigned as a modified version of a LEGO Mindstorm
castor wheel design.
We are still having trouble getting FlameBot to travel straight when both
motors are powered equally (watch for this pull problem near the end of the
second movie clip for week 2). We embark on coding for navigation this week and finalizing the
extinguisher design.
Note to Selves: Avoid lighting matches in the robotics lab without
informing other teams of your actions, as they may get quite a scare and
even think that their wires are overheating and their motors burning.

|
More compact frame makes for less breakage. It moves with the bump sensor (yellow "arms") toward the front.
|

|
A video of the new design in action. |
|
|
And another, navigating the corridors with a slightly narrower turning radius.
|
|