|
 
CS 154 - Lab Projects
Marissa Anderson . Matt Livianu . Daniel Lowd . Eric Wu
Project 2: WallBot Intro
Following up on our first project, FlameBot, we
are adding a sonar sensor to the Handyboard and attempting to implement a
right-wall-following algorithm. The goal of our project is to construct an
autonomous robot out of Legos which can wall-follow using motors, sonar,
and IR sensors connected to a Handyboard controller.
Approach
We have drafted an initial design
outline.
Design
The chassis for WallBot is significantly different than FlameBot. Since
one of the major problems with FlameBot was a significant lack of accuracy
in fine steering control, we have attempted to improve on our design.
WallBot has one motor powering the two rear wheels, which are connected
via a differential shell in an attempt to reduce slippage during turns.
The front two wheels are controlled with a standard motor turning a rack
and pinion assembly.
In retrospect, the differential shell for the rear wheels may have been
unnecessary. The current design of the rack and pinion steering on the
front wheels restricts turning to fairly wide arcs. We had hoped to have
an extra position-controlled servo motor to accurately control steering,
but we have a reasonable alternative using the standard motor to steer and
a bump sensor which theoretically would be able to tell us if the front
axle was currently pointed straight forward. In practice, this didn't
work very accurately, so we have incorporated a rotation sensor instead,
which in conjunction with the motor and some experimentation, simulates a
position-controlled servo reasonably well.
We ran into a problem with the weight of the chassis bending the axles
of the rear wheels, causing them to turn very slowly, held back by
friction. The initial support structure for the rear wheels did not
hold them in place very well and while it reduced the friction
considerably, there were too many movable parts to eliminate
friction (see first HallBot pictures below). The current design is much
more stable and does not allow the axles to bend in the
slightest. Woohoo!
Control
The control program is broken up into two processes, since each process
needs to sleep occasionally and run continuously the rest of the time.
The moveServo() function continuously sweeps the sonar, takes readings,
and sets global variables describing the current state of the world. The
wallFollow() function then reads those variables and attempts to stay
within a certain predefined distance from the walls. The code is
available here.
Sensing
The sonar sensor is mounted on a servo motor which allows it to move
from side to side. The sonar sweeps through 5 regions of 30 degrees
each, from straight ahead to 60 degrees backwards and right. In each
region, it records the average distance for that region in an array.
Originally we also attempted to use the minimum values for each region
instead of the average. We found that a single erroneously low
reading would then confuse WallBot for an entire cycle of the sonar,
or at least several seconds. But by taking the minimum of the averages
instead, WallBot can more accurately determine its current orientation
with respect to the wall. WallBot used a PD control to manage its
distance from the wall. The proportional term is based on the
difference between the current distance from the wall and the desired
distance and the derivative term is the difference between the
previous average reading in a region and the current reading. We had
some trouble calibrating the PD control gain variables. The total PD
error is erratic because we only have one interfaced sonar to work
with and the sonar turns rather slowly as compared to the movement of
the robot. The PD control only affects side range errors and the front
range is maintained separately.
We discovered that the long hallways of the Libra Complex resulted in
erroneous sonar values from far walls. Essentially, the sonar detected
echos from previous blips while in the same scanning region and this
produced very close readings. We hacked a solution by changing
"extremely close" sonar readings to very far sonar readings,
essentially imitating what the sonar should have outputted in the
first place.
Steering
The wallFollow() function simply reads the global variables set by
moveServo and attempts to steer in the correct direction. Most of the
logic is actually kept in the other function; however, since turning
the wheels and correcting for overshoot from the motor takes time, the
actual steering needs to be done in a separate process. We had many
problems with the robot turning left, away from the wall, and moving
away before the sonar could read the distance to the right wall and
apply a correction. The solution was to slow the robot down and
attempt to speed up the computation of sonar error values in order to
speed up rotation of the servo motor.
For the rack-and-pinion steering, we ran into friciton problems. The
system was designed so that the bump sensor would be depressed when
the wheels pointed the robot straight. The piece which depressed the
bump sensor was sandwiched between two pieces (ideally frictionless,
but amazingly enough, frictionless LEGOs do not exist). We redesigned
the steering system such that the actuator for the bump sensor was
suspended rather than sandwiched, and steering accuracy improved
tremendously.
Steering essentially works by turning towards the wall when the error
value is too high and away from the wall when the error value is too
low. The rotation sensor notifies the robot that it has reached a
certain turning angle. When the wheels reach this angle, they then
return to the center position. The wheels are programmed to always
return to center because otherwise, the robot turns too much before
the sonar has a chance to read the first regaions again and so the
robot runs into the wall it is following instead of simply getting
closer to it.
Other Time Consuming Issues
Things to avoid next time:
 |
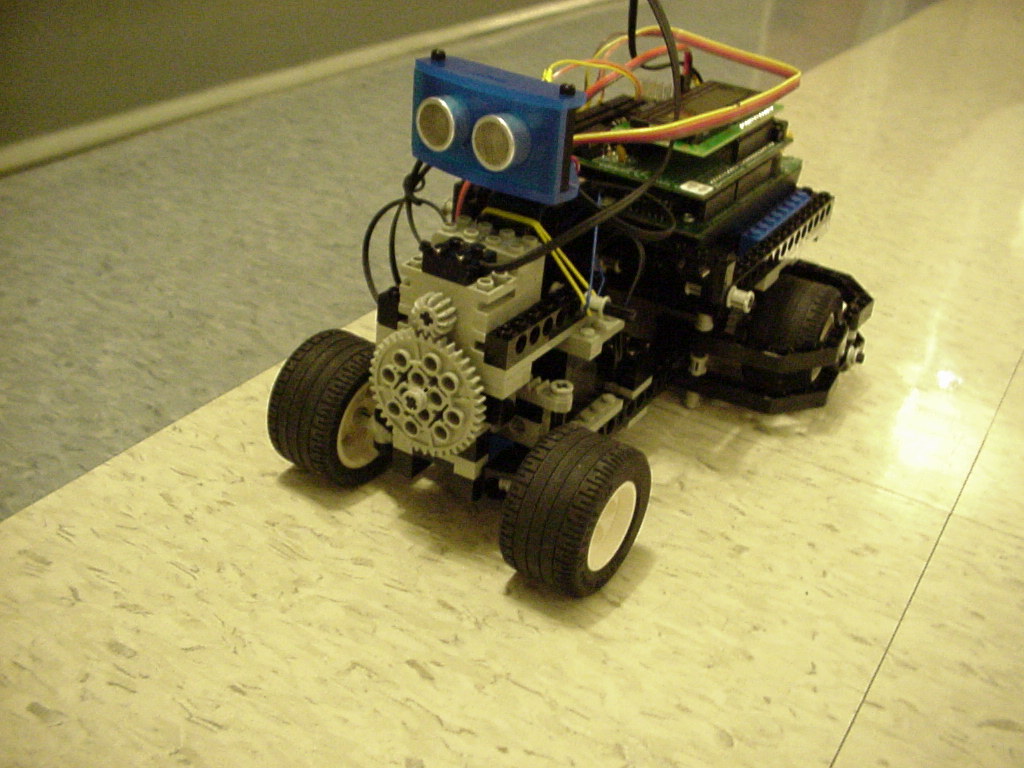
HallBot with the sonar mounted to the front. |
|