|
 
CS 154 - Lab Projects
Marissa Anderson . Matt Livianu . Daniel Lowd . Eric Wu
Project 2: WallBot
Intro
Following up on our first project, Flamebot, we are adding sonar sensors to the Handyboard and attempting to implement a wall-following algorithm. The goal of our project is to construct an autonomous robot out of
Legos which can wall-follow using motors, sonars, and IR sensors connected
to a Handyboard controller.
Approach
We have drafted an initial design outline.
Construction
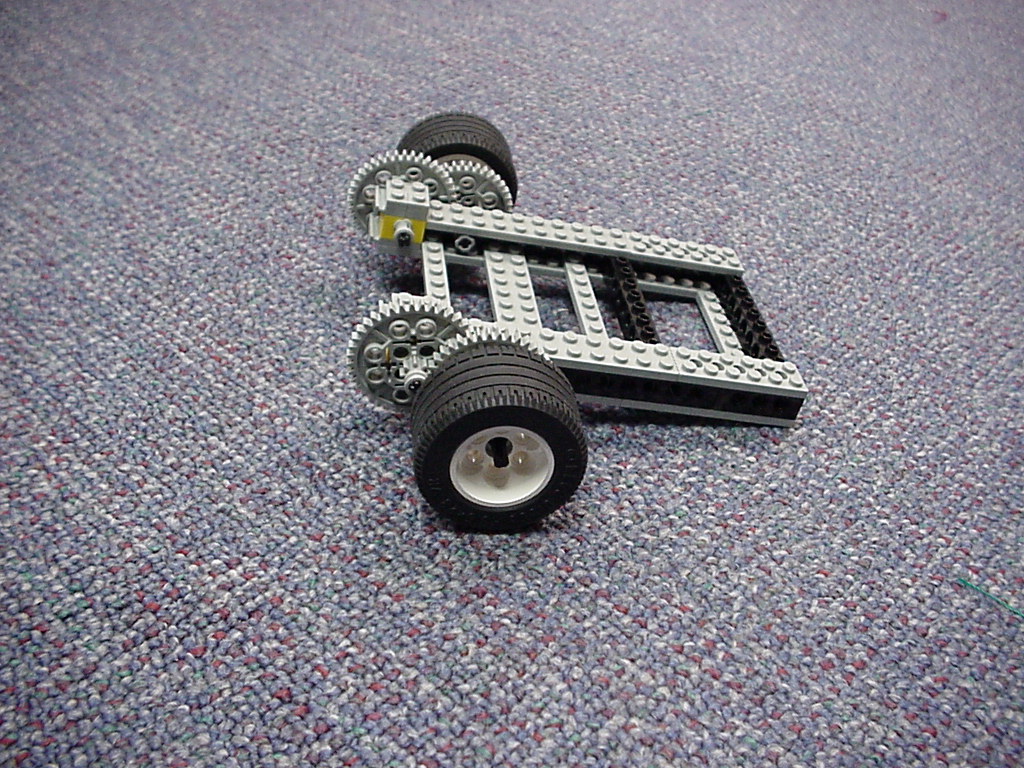
Flamebot had some difficulty with precise navigation, so although we anticipate Legos will be a little difficult to control precisely, we are attempting to improve on the design. Currently we are considering developing either a rack-and-pinion drive system, or a track-drive, since we want to be able to make small course changes as accurately as possible.
Sensors
Our plan is to have one sonar sensor on a stepper motor rotating
on an axis parallel to the ground in a 180 degree arc, so that the robot
can find the distances from its left side to its right. There will also be
a sonar on the front of the robot so that constant input from the front of
the robot prevents crashing head on into walls. We have not decided where
to put the IR sensors if we attach them to the robot at all.
We put together the sonar sensors this week, running into some
troubles along the way. First having to hone our soldering skills so that
we did not ruin the expensive sensors, the actual task of soldering
quickly became more and more delicate. After soldering the wires
successfully, we ran into other troubles. The directions for the sonar do
not detail how to interface the sonar with a handyboard, and the code
found online to interface a previous version of the sonar produce run-time
errors on the board. The instructions say that resistors may be needed in
order to receive usable output from the sonar. We will try to interface
the previous version of the sonar later this week when it arrives (it has
been ordered). We are also putting together the IR sensor and hope to
interface that with the board later this week.
Another hurdle in assembling the sensors was the lack of included
resistors. A quick trip to Radio Shack resolved this problem, although
we had to purchase 500 resistors of various resistances in order to
acquire the two necessary for assembling the sonar sensor.

|
Beginning to solder the sensors together.
|

|
A first crack at the Lego Handyboard frame. |
|