Vision
A world in which computational agents intuitively and fluidly navigate the messiness of people's lives.
The mission of the HEATlab is to create new techniques for human-robot teaming—the flexible navigation and coordination of complex, inter-related activities in shared spaces. We focus on using ideas from AI to automate the scheduling and coordination of multiple agents, including humans, computational agents, and robots (embodied agents). We are particularly motivated by the challenge of coordinating the activities of human-robot teams in environments that require explicit cooperation to be successful. Our goal is to create human-robot teams is that the relative strengths of humans and agents to accomplish what neither can achieve alone. Read more in the recent PCMag interview with Jim about HEATlab!For the latest HEATlab news and highlights, follow us on social media:
Projects
Click on the project descriptions below for more details about what we do and how you can apply to get involved! Apply at: https://www.cs.hmc.edu/research/






Publications
Here is a selection of our publications. Click here for a more comprehensive list.
An Undergraduate Consortium for Addressing the Leaky Pipeline to Computing Research
Boerkoel and Ergezer
Sensitivity Analysis for Dynamic Control of PSTNs with Skewed Distributions
Chen, Ma, Wu, and Boerkoel
Analyzing the Fluency of Human-Robot Interactions
Weiss, Jacotin, Jackson, Yuan, and Boerkoel
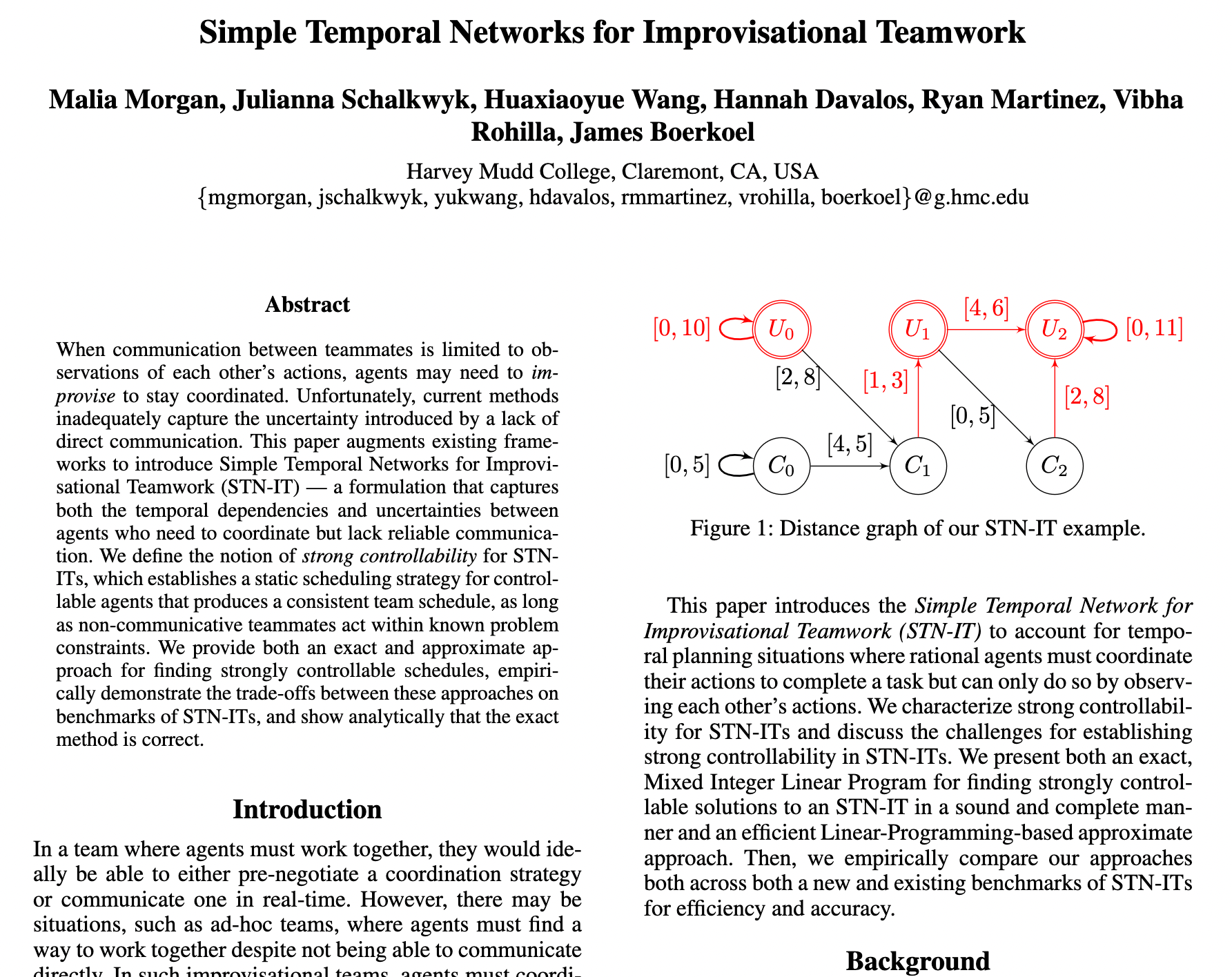
Simple Temporal Networks for Improvisational Teamwork
Morgan, Schalkwyk, Wang, Davalos, Martinez, Rohilla, and Boerkoel
Quantifying Controllability in Temporal Networks with Uncertainty
Akmal, Ammons, Li, Gao, Popowski, and Boerkoel
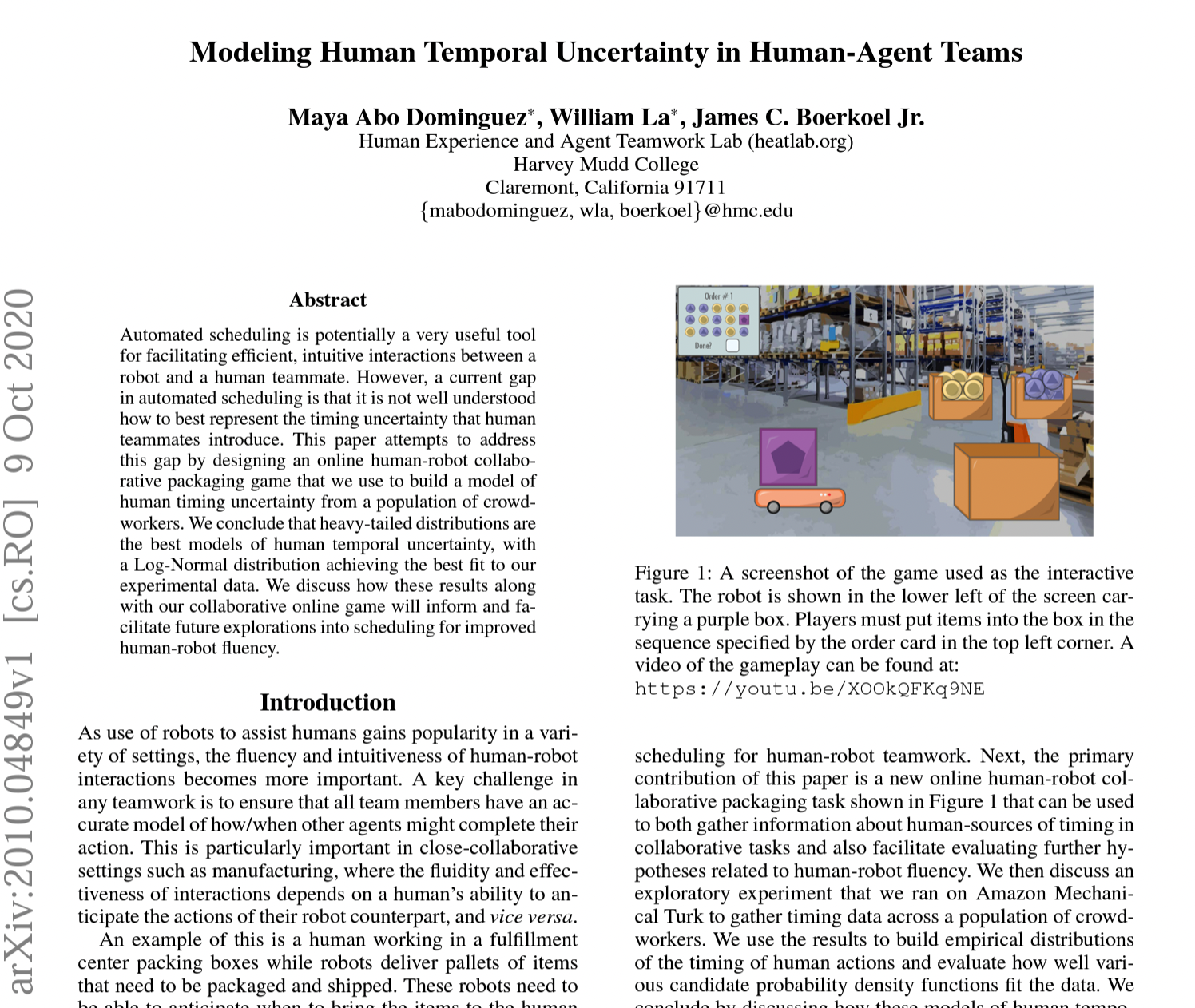
Modeling Human Temporal Uncertainty in Human-Agent Teams
Abo Dominguez, La, and Boerkoel
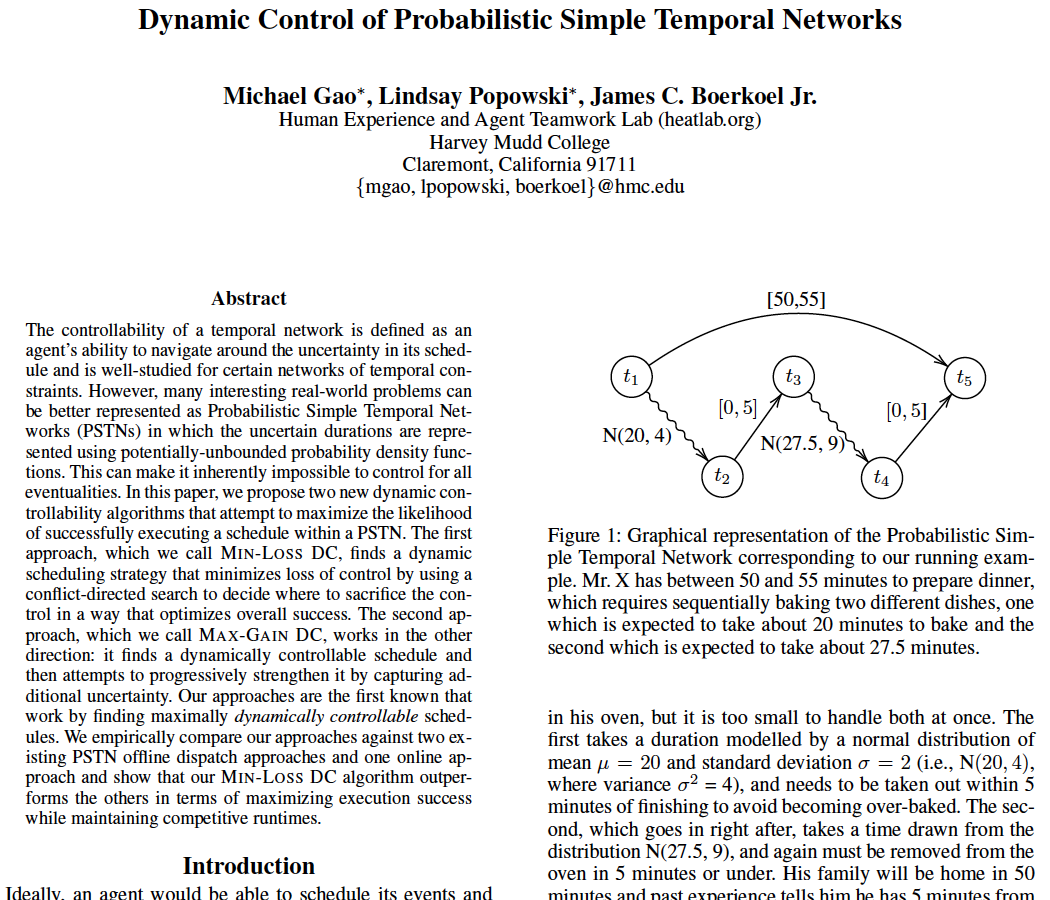
Dynamic Control of Probabilistic Simple Temporal Networks
Gao, Popowski, and Boerkoel
MAD-TN: A Tool for Measuring Fluency in Human-Robot Collaboration
Isaacson, Rice, and Boerkoel
Quantifying Degrees of Controllability in Temporal Networks with Uncertainty
Akmal, Ammons, Li, and Boerkoel
DREAM: An Algorithm for Mitigating the Overhead of Robust Rescheduling
Abrahams, Chu, Diehl, Knittel, Lin, Lloyd, Boerkoel, and Frank
Measuring and Optimizing Durability against Scheduling Disturbances
Lee, Ojha, and Boerkoel
New Perspectives on Flexibility in Simple Temporal Planning
Huang, Lloyd, Omar, and Boerkoel
Who Takes the Lead? Automated Scheduling for Human-Robot Teams
Castro, Roberts, Mena, and Boerkoel
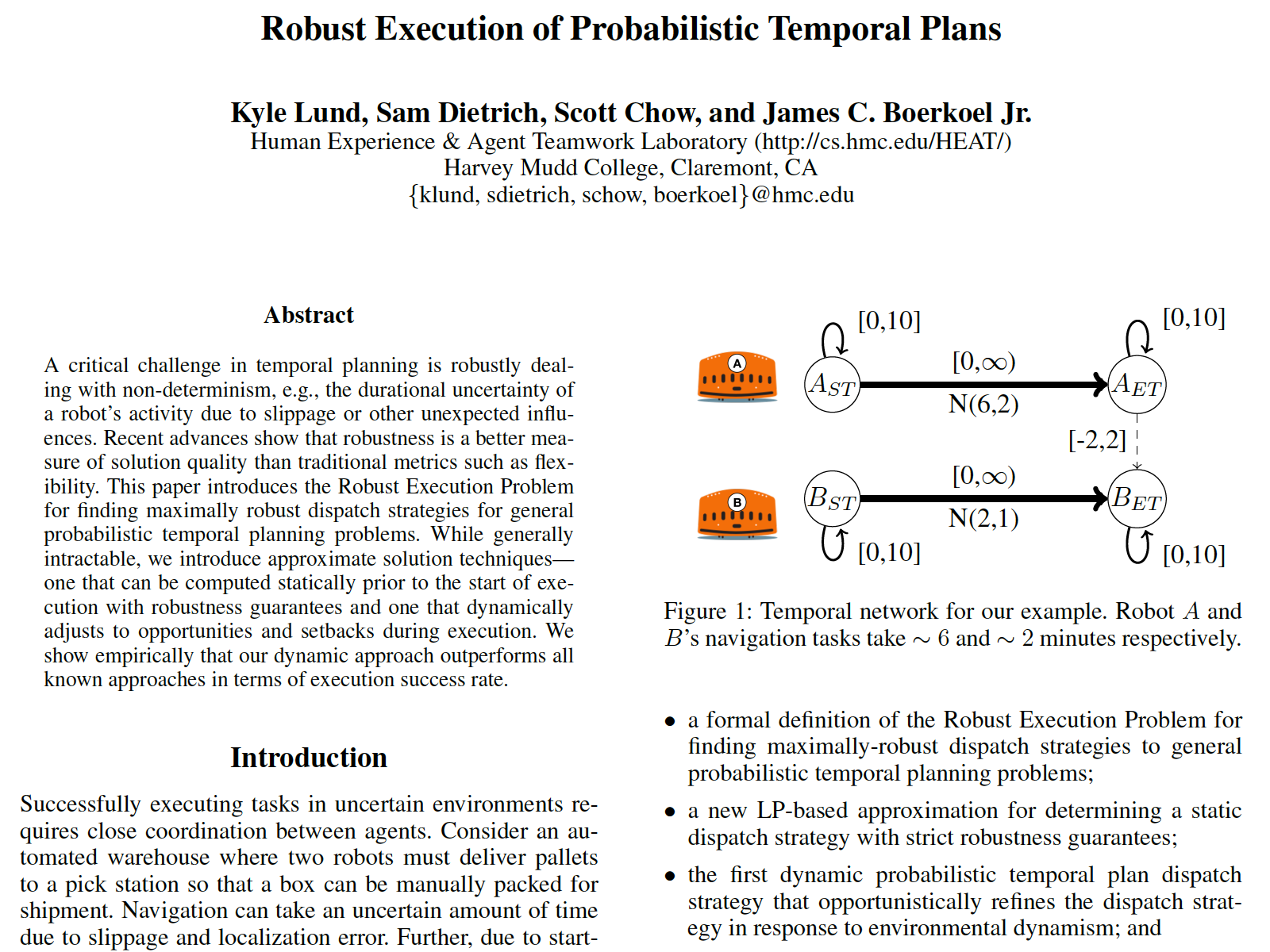
Robust Execution of Probabilistic Temporal Plans
Lund, Dietrich, Chow, and Boerkoel
Trust and Cooperation in Human-Robot Decision Making
Wu, Paeng, Linder, Valdesolo, and Boerkoel
Robustness in Probabilistic Temporal Planning
Brooks, Reed, Gruver, and Boerkoel
Predicting the Quality of User Experiences to Improve Productivity and Wellness
Donti, Rosenbloom, Gruver, and Boerkoel
Exploring Active and Passive Team-Based Coordination
Donti and Boerkoel
Distributed Reasoning for Multiagent Simple Temporal Problems
Boerkoel and Durfee
Towards Control and Sensing for an Autonomous Mobile Robot Assistant Navigating Assembly Lines
Unhelkar, Perez, Boerkoel, Bix, Bartscher, and Shah
Distributed Algorithms for Incrementally Maintaining Multiagent Simple Temporal Networks
Boerkoel, Planken, Wilcox, and Shah
Planning for Flexible Human-Robot Co-navigation in Dynamic Manufacturing Environments
Boerkoel and Shah
Using Hybrid Scheduling for the Semi-Autonomous Formation of Expert Teams
Durfee, Boerkoel, and Sleight
Decoupling the Multiagent Disjunctive Temporal Problem
Boerkoel and Durfee
A Distributed Approach to Summarizing Spaces of Multiagent Schedules
Boerkoel and Durfee
Generalized Solution Techniques for Preference-Based Constrained Optimization with CP-nets
Boerkoel, Durfee, and Purrington
Current Team
Julia Hansen '25
MAD about Fluency
Rosy Chen, '24
Improvisational Teamwork

Zeneve Jacotin, '24
MAD about Fluency

Eryn Ma, Pomona '24
Improvisational Teamwork
Emily Weiss, '24
MAD about Fluency
Amy Yuan '24
MAD about Fluency

Lab Alumni

Malia Morgan '23
Improvisational Teamwork

Julianna Schalkwyk '23
Improvisational Teamwork

Ingrid Wu '23
Improvisational Teamwork
Maya Abo Dominguez '22
MAD about Fluency
William La '22
MAD about Fluency

Ryan Martinez '22
Prob-in-Ctrl

Vibha Rohilla '22
Prob-in-Ctrl

Yuki Wang '22
Improvisational Teamwork

Hannah Davalos '21
Prob-in-Ctrl

Seth Isaacson '21
MAD about Fluency

Lindsay Popowski '21
Ctrl-Alt-Repeat

Savana Ammons '20
Prob-in-Ctrl
Michael Gao '20
Ctrl-Alt-Repeat
Joon Lee '20
Acrobotics
Tiffany Madruga'20
MAD About Fluency
Athena Paraskevas-Nevius'20
MAD About Fluency

Megan Robalewski, Scripps College'20
MAD About Fluency

Gretchen Rice, Olin College '20
MAD about Fluency

Jordan Abrahams '19
Robot Brunch
Shyan Akmal'19
Prob-in-Ctrl

Morgan Frisby '19
HRI in Retail

Maggie Li '19
Prob-in-Ctrl

Viva Ojha '19
Acrobotics
Brenner Ryan '19
Robot Brunch


Amy Huang '18
PolyBots!

Liam Lloyd '18
PolyBots!

Montana Roberts, Scripps '18
Human-Robot Teamwork
Jane Wu '18
Human Robot Teamwork
Scott Chow '17
Robot Brunch

Sam Dietrich '17
Robot Brunch

Kyle Lund '17
Robot Brunch
Erin Paeng '17
Human Robot Teamwork

Emi Reed '17
Robot Brunch; PaWPal

Sam Echevarria '16
PaWPal
Kari Linder, CMC '16
Human Robot Teamwork

Emma Meersman '16
PaWPal


Alex Gruver '15
PaWPal; Robot Brunch

Honey Rosenbloom '15
PaWPal

Jeb Brooks '14
Robot Brunch